�����W�j���в�����늄әC���ӿ���
����������������ʷ����
(���ϿƼ���W���������471003)
ժҪ�������в�����늄әC������\�ЙC���ͽY�����c��ʹ���y�Ը��D��ֱ�����ӡ�ᘌ�ԓ���}���OӋ�˅����ھ����m���{�����D�ٿ��������Ԍ��F����늄әC�ĸ��D�����ӿ��ơ������W�j���F�������������ھ����m���{�������m����ͬ�D�ٽo��ֵ������Ҫ��ְl�]늙C��������������늄әC���ӿ��ٜʴ_�������㷨��Ч���ɿ���
�P�I�~������늄әC�����ӣ��W�j�����m��
�ЈD���̖��tm1383 �īI���R�a��a ���¾�̖��1004һ7018(2010)04��0042��03
o�� ��
�S�������I��IJ�����չ�����в�����늄әC���D�ٿ���Ҳ�����Խ��Խ�ߵ�����Ҫ��[1]�������в�����늄әC���D�ٿ��ƿ���ͨ�^�{��늙C��늉����l�ʡ���ֵ��(��)��λ��팍�F[2]������늙C�Ȳ�����մɲ��ϵķǾ��Լ����D�ӽ��|��������W���ԣ�ʹ���в�����늄әC�y�Ը��D��ֱ������[1-2]��
�Գ��õ��{�l�{�ٞ�����ͨ����Ҫ����늙C����ֱ�����ӣ�Ȼ���{���l�ʣ�ʹ�D�پ����������o��ֵ���@�����ͬ��늄әC����ͬ�����^�̣�������늄әC�D���c����늉��l��֮�g���Pϵ�����^����صķǾ��ԣ���ͬ��ͬ��늄әC�D���c�l��֮�g�ĺ��α����Pϵ[3]�����l���c늉���ֵ�ȿɿ�׃��֮�g��������Pϵ���Ķ�ʹ���@һ���D�������^�̲����FѸ�١��ʴ_��Ŀ�ˡ�
�����OӋ�˅����ھ����m���{�����D���]�h���������Ԍ��F�����в�����늄әC�ĸ��D�����ӿ���.���Y������������Ч�����á�
1����늄әC���D�����ӌ�����
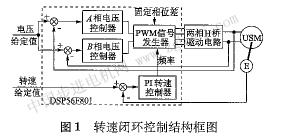
���Č����늙C��shinsei usr60�̓����в�����늄әC�������]�h���Ʋ����{����늉��l�ʵČ��F��ʽ�������M�и��D�����ӌ��Ŀ����b��[4]���Y����Dl��ʾ�����ƹ�����dsp���̌��F���D�У����D���a��e�c늙Cͬ�S�����B�ӣ����ڽo���D�ٷ�����̖��������늉��]�h�����ڱ��C����늉���ֵһ�µ�ͬ�r������늉���ֵ��o��ֵ���Ķ��������_�h��B��늉���ֵ�S�l���{����׃���ĬF������l���{���c늉���ֵ֮�g�Ŀ���������Pϵ��������ͨ�^�{�l�M���D�ٿ��Ƶ����ܡ�
��늙C�D�ٽo��ֵ�^�ߕr�����ӿ����^�̞飺�D�ٿ������ڿ�����ʼ�r���O��ݔ��������(�l��ֵ)���ʼֵf0��ԓ�l��ֵ������늙C�܉�ֱ�����ӵ��^���D��ֵ��늙C���l�ʞ�f0����늉������£������������ӣ��D��pi�����������D���`���{���l��ֵ��ʹ�D����u���ߣ�څ�ڽo��ֵ��
��������늙C���ʩ����늉��������_ʼ���D�����ǽ��^һ���ӕr����_ʼ�D�ӡ��D2�錍�y��늙C�����^�̶�늉����O����늉���ֵ���Ρ���늺�늙C��늉���ֵ�Ђ��ӑB�����^�̣��@һ늉�׃���^����ҪԴ��늙C���Ӊ�늲�����늉������µ����ԄӑB׃����Ҳ�c���·׃������ƥ��늸е������惦�^�����P���S��늉���ֵ������늙C�����в�����ĹO����늉���ֵ��u���������A�o��ʹ늙C���D�ӽ��|��������^����oĦ�����������в��������ijһ�ֵ֮��늙C�ŕ��_ʼ���D���D2�ЈD����t0�r�̣�늙C�_ʼ���D�����]�D�ٿ������Ŀ����^�̣�����늺��D�ٿ����������_ʼ�a���������ã��t��t0�r��֮ǰ�������D�ٞ��㣬���������_���e��͠�B��ݔ���l�ʽo��ֵ�h�x�܉�ʹ늙C���ӵij�ʼֵ�壬����늙C�o�����ӡ����Ԍ��D�ٿ������OӋ����늺�ݔ���l�ʽo��ֵf0���S�ֲ�׃���ȴ����D���a����һ�������}�_(���������½���)��������늙C�_ʼ���D�������_ʼ�a���������ã�����pi����Ҏ���{���l�ʡ�
�����^���У��D�ٵĿ�����ͨ�^�{���l�ʌ��F�ġ��@Ȼ���������^�����l���{����׃����Խ�������^������r�gԽ�̡�����У����ù̶�pl�������еı���ϵ��kp���{���e��ϵ��kl�ķ�������׃�l���{����׃���ʡ�����������ͬ�D�ٽo��ֵ��r�£�����ki��늙C�����^�̼ӿ죻������k1�^��ʹ�l��׃���^�죬������늙Cͣ�D���������ӡ����ڲ�ͬ�D�ٽo��ֵ�������܉�ʹ늙C���ƽ�����ӵ�k1ֵ�����Y����D3�Д����c(С���K)��ʾ�������������S���D�ٽo��ֵ�����m��
|