�_�P����늄әC���S�ŷ�ϵ�y���о��c���F
���յ£��껣��� ��
���Ї��V�I��W��Ϣ�c늚�̌WԺ�����K����22008��
ժҪ����B���p�_�P�����ŷ�늄әC������ϵ�y�ĽM�ɼ����S�ŷ�ԭ���������OӋĿ�˽o����һ���_�P����늄әCλ���ŷ���ģ�����Ʋ��ԣ������әCϵ�y�M����ԇ��о���ԇ�Y��������ԓ���Ʋ��Բ������У������\��Ч�����á�
�P�I�~���_�P����늄әC�����S�ŷ���ģ������
�Ї����̖��tm 352�īI���R�a��a���¾�̖��1673-6540(2010)04-0017-04
0 �� ��
�_�P����늙C( srm)���S�ŷ�ϵ�y�������Ã��_srm�քe���w�S�����l���S�������ŷ��\�ӣ����@���_늙Cͬ�r��ͬһ������ʹ���،�����x-yƽ���������������\�ӡ�srm�ĸ߶ȷǾ��Լ�׃�Y����׃���������ԣ�ʹ�����ŷ��I��Č��H�������ܵ����ƣ����Â��y��pid�����ѽ����ĸ����Ͻ�Q�Ǿ��Ԇ��}������ģ�����Ʋ���Ҫ����ϵ�y���_�Ĕ��Wģ�q�����IJ���ԓ���Ʋ��ԁ팍�F���S�ŷ��\�ӡ�
1 ϵ�y�M��
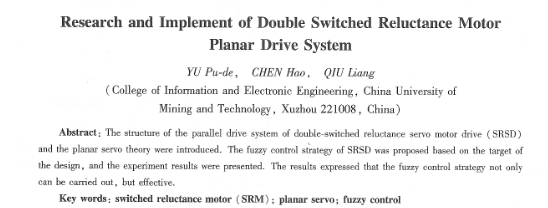
��ԇ����õ�srm���S�ŷ�ϵ�y���������_����12/8�Y����srm���ɂ������p�_�Pʽ����׃�Q�����ɂ���������һ����λ�C����ϵ�y�У����S�����������tms320f28335���cϵ�Д�����̖̎����( dsp)��y�S�����������tms320f2812���cϵ��dsp��srm���S�ŷ�ϵ�yʾ��D��Dl��ʾ��
�������S�ŷ�ϵ�y�֞�x��y�S����ɂ�ϵ�y������x�S�����������������������y�S�������������Ŀ�������ÿ��ϵ�y���Ъ�����Ӳ��ϵ�y��������������( dsp)������׃�Q�����������·��Ӳ�����o�·�������λ�Ùz�y���ȡ�ֻҪ�ڃɂ����������M���������O�̣������M�ж��S�ŷ�ϵ�y���\�С�
�������S�ŷ�ϵ�y�\�Еr��x��y�S����������\�����£�x�S������������棬dsp������λ�C�Ķ��S���˺������ܵ��㷨�M����늉��ķ��䣬Ȼ��y�S���˼������늉�ֵ���oy�S��������������յ���y�S������������ش_�J��Ϣ�����Ӷ��S�ŷ�ϵ�y��������ǰ�\�Р�B���r�l�ͽo��λ�C��y�S������������棬r�S������������յ�y�S���˺���늉�ֵ���\��l���S�ŷ�ϵ�y������x�S�������l�ʹ_�J��Ϣ�����յ����C�l�͵�������̖�����ӏęC�������\�Р�B���r�����o��dsp���Ķ����F�pϵ�y�ąf���\�С�
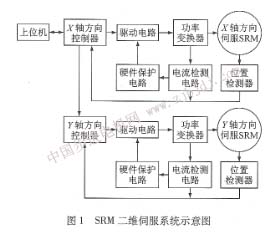
��ϵ�y���HҪ�����������o�Ŀ��ưl��y�S���ˣ�ͬ�rҲҪ���Ŀ������Į�ǰ�\����r����ˣ��ɂ�ϵ�y֮�g����Ϣ��횲����p����f����M��ͨ��Ҫ��ϵ�y���ö�ͨ�����_���п�( mcbsp)���Fͨ�ţ����������_�B����D2��ʾ��
���У�mcbsp���C�l�͔�����ɼ����_���ęC���ܔ������������_��
2���Ʋ���
ϵ�y���FĿ���Ƕ��S�ŷ����OӋĿ�˾����ڸ��Nλ�ýo����r����쵽�_�o��λ�á�ᘌ�srm�ĸ߶ȷǾ��Լ�׃�Y����׃���������ԣ���ϵ�y����ģ�����Ʋ��ԁ팍�F���S�ŷ����ơ�
���S������ó�Ҏ�ļ��ٶȿ��Ʋ��ԣ����Ҫ�C�Ͽ��]x��y�S����o����ͬ�r�������쵽�_�o��Ŀ�ˣ�****��r��ͬ�r���_��������Ҫ��y�S�����M���������ŷ����ơ�
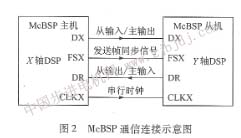
y�S���ŷ��^�̷ּ��١�ģ�����ƺ��Ƅ������A�Ρ��Ƅ��^���О��ֹ�^�Ƅӌ��·����\�У����ٶȽ���ij��ֵ��d��Ʋȥ���Ӽ��늙C��һչ�Ԝp�٣����D��λ���_��ָ���λ��F�ʴ_ͣ܇�������ŷ��^�̽��ٶ�׃������ʾ��D��D3(a)��ʾ���ŷ��o��λ���^С����r�£������\���A��ֻ�֞������A�κ��Ƅ��A�Σ���D3(b)��ʾ��
�D3(a)�У�i�������A�Σ������\���A�Σ�ģ�����ƣ������鷴���Ƅ��A�Σ�����T���\���A�Ρ��D3(b)�У�i�������A�Σ����鷴���Ƅ��A�Σ�����T���\���A�� |