�Կ��_�����������OӋ���䑪��
�O�����Ǹ���
���㽭���I��W��Ϣ���̌WԺ���㽭����310032��
ժҪ���Կ��_������( adrc)��ᘌ��Ǿ��Բ��_��ϵ�y�����һ�N���ͷǾ��Կ��������������о��Կ��_���Ƽ��g��Փ�Ļ��A�ϣ�ͨ�^�Ǿ���ϵ�y�ľ��Ի��ͅ������ϵȷ����OӋ���˃���adrc�����o�����µą�������������matlab����������������adrc���{���ą������p�٣��{���^��Ҳ�õ������������ܲ�δ�ܵ�Ӱ푣�������ϵ�y�IJ��_���Ժ���_�к����m���Ժ������ԡ�
�P�I�~���Կ��_�������������㷨�������ŷ�ϵ�y
�ЈD���̖��tm571 �īI���R�a��a���¾�̖��1673-6540(2010)03-0026-05
0 �� ��
�Կ��_��������( adrc)���Ї��ƌWԺ�n�����о��T�����һ�N���͵ķǾ���������������adrc����ه�ڱ��،���ľ��_���Wģ�ͣ����������ԏ���ϵ�y푑��졢���ɔ_�������ȃ��c����Ч�ؽ�Q��ϵ�y�����Ժͳ��{֮�g��ì�ܡ�������������ѽ����L���l�ϵ�y��������ơ�늙C�τӡ��w�����ˑB���Ƶ��I��õ��V�����ã������������Ҳ�õ����Mһ�������ƺͰlչ�����F�˻����W�j��adrc��׃�Y��adrc�ȸ��N���M�Ϳ�������
adrc�������M�ɲ��־����÷Ǿ��Ժ����������^�࣬�{�����s����߀�]�г���ą���������Փ�l���£����������^�̺�Ч���ںܴ�̶�����ه���˂��Ľ���ˣ������������ͅ����������}�ɞ��Ƽsadrc�lչ��ƿ�i��ͨ�^�����㷨�������ڱ��C����Ч����ǰ���O��غ���adrc�������{���^�̣��Ķ�ʹ�ÿ��������m�ό��H���I���Ƶ�Ҫ�Uչ�˿������đ��÷�����
�����ŷ�ϵ�y���^�ߵ�����ָ��Ҫ���e������ͬ��늙C( pmsm)λ���ŷ�ϵ�y�У�pmsm����һ����׃�����Ǿ��Ժ͏���ϵı��،����зǾ��ԺͲ��_���ԣ��Լ������\�����ԣ����F�����ܵ��ŷ�ϵ�y���ƣ�������������ܵĿ������������ڿ����ԡ��ʴ_�Ե�Ҫ���^�ߵĈ��ϣ����M�Ŀ��Ʋ��Ծ�����Ҫ�ˡ���������adrc����pmsm�ŷ�ϵ�y�У����H�㷨���Σ����������{�������Ҍ�ϵ�y����׃�����ⲿ�ɔ_���к��������ԣ�������ŷ�ϵ�y�Ŀ��ƾ��ȡ�
1adrc���ͽY��
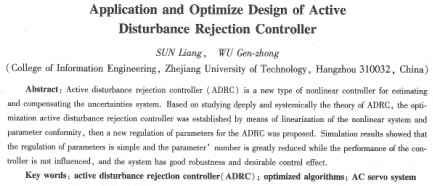
adrc���ڷ������Ի����A���OӋ�����Ϳ��������䌍�|�����á��^�y+�a�����ķ�����̎��ϵ�y�зǾ��ԺͲ��_���ԣ�ͬ�r��ϷǾ��Եķ�����ʽ����߿������ĄӑB���ܡ��������ɸ�ۙ����(td)���U����B�^�y��(eso)�ͷǾ��Է���������( nlsef)�����ֽM�ɣ��Dl�����ad-rc�Y���D��
�O�����_���_�ӵķǾ��Ա��،���
����f��δ֪�ķǾ��ԕr׃������w(t)���ⲿ�_�ӣ�u(t)�����ݔ�룬b��ģ�ͅ����������Կ��_��Փ�����OӋ��adrc�㷨�Y�����¡�
��ʽ(2)~(6)��֪��adrc���{��������Ҫ����td��{r0����0}��eso�����е�{��01����02����03����l����2����3����1��b0}��nlsef�е�{��1����2����4����5����2}���@Щ�����Ĵ_����һ헷��s���^�̣�����Ŀǰ�����{����Ҫ߀��������ڌ��Hʹ�Õr�{�����s�������ڏV�����á�
2 adrc�ă����㷨
���͵�adrcģ�Ͳ����`��ķǾ��Ա��������{������Փ�Ͽ��Ԍ��F�^�õĿ������ܣ������H�����������������࣬�㷨���F��Ҫ�^��Ӌ���������¿�������׃�L��Ӱ��˿����������ܡ�
2.1�����㷨�OӋ����������
������adrc�����M�ɲ����M�о��Ժ����ͅ������ϣ������䃞����adrc����ͨ�^������C������Y������Ч�Լ������ԣ�ͻ����adrc���I���õ����ơ�
����ʽ(1)������ۙ�����Ļ����YՓ�����Եó�ʽ(7)Ҳ����Ч�ķǾ��Ը�ۙ���������侀�Ի����Եó����Ը�ۙ�����㷨�Y����ʽ(8)�� |