h�ޞV�����g���ŷ�ϵ�y(t��ng)�еđ���
�̝M܊���̄�������ѩ���̕���
(��ɽ��W���ӱ��ػʍu066004)
ժҪ���о����ŷ�ϵ�y(t��ng)��h�ޞV�����OӋ���}�����Ȍ��oˢֱ��늄әC����ϵ�y(t��ng)�M��r�����ܿ������OӋ�������ɔ_���ɱ������r�£��OӋ��h�ޞV������ʹ�ÞV���`��ϵ�y(t��ng)�u����(w��n)���ҝM��һ����h������ָ�ˣ��o���˞V�������ڵij�֗l������ͨ�^���׃�Q�õ����OӋ�V������lmi����.ͨ�^���lmi�����Եõ��V��������������С��ָ���Ͻ�ij�֗l����������˞V�����ą���.�����挍���C����ԓ��������Ч�ԡ�
0�� ��
�ŷ�ϵ�y(t��ng)�Ą���Ʒ�|ֱ��Ӱ��Ԅӿ���ϵ�y(t��ng)�Ŀ��ƾ��ȣ������I(y��)�F���ձ���ڵ����ڔ_���ںܴ�̶���Ӱ��ŷ�ϵ�y(t��ng)�����ܡ�һ���õ��ŷ�ϵ�y(t��ng)�������N�ɔ_���^�����������á�
�������V������һ�N�Ǿ���ϵ�y(t��ng)���S�C�^�y������ϵ�y(t��ng)����ϵ�y(t��ng)���͜y�����r�����܌�ϵ�y(t��ng)��B(t��i)�M�Мʴ_��Ӌ����������������V�������ŷ�ϵ�y(t��ng)�е��īI�ѽ��ܶ࣬���ǿ������V���nj����_��֪��ϵ�y(t��ng)�M���о��ģ�������һ�����H���ŷ�ϵ�y(t��ng)������Ҫ�Ƀɂ�;�����룺���ŷ�ϵ�y(t��ng)�����r������Ҫ�������C��ָ������п��ܯB�����@Щָ��֮�϶��M���ŷ�ϵ�y(t��ng)��ͬ�r���ŷ�ϵ�y(t��ng)�������]�h(hu��n)ϵ�y(t��ng)�����磬�ڴ����λ���ŷ�ϵ�y(t��ng)�У���Ҫ���bһЩλ�Â��������ṩ늙C�D�ӵ�λ����Ϣ���@�ӣ������п��ܯB�����@Щ������̖���M���ŷ�ϵ�y(t��ng)���ŷ�ϵ�y(t��ng)�Ȳ�Ҳ���ڸɔ_����Ҫ������ģ�r�����ͺ���������ĽY���ɔ_�Լ����H�ŷ�ϵ�y(t��ng)����׃��������ą����ɔ_������ŷ�ϵ�y(t��ng)����������ģ�Ͳ��_���Ի�(��)�ɔ_��̖�y(t��ng)Ӌ���Բ���ȫ��֪���@Щ���_������ʹ��ϵ�y(t��ng)�Ŀ������V���㷨ʧȥ****�ԣ���Ӌ���ȴ�ͣ����ؕr������V���l(f��)ɢ����Щ�꣬�˂����������Ƶ�˼�����뵽�V���Ё����γ��������V����Փ�������^�д����Ե���h�������V���㷨��
h�ޞV��һֱ�ǿ����I��V���Pע���n�}֮һ�������C�ˏ����ɔ_���u���`���l2����С��һ��������ˮƽ���͂��y(t��ng)�Ŀ������V����ȣ�h�ޞV�����g���S����(y��u)�c�����ȣ��ɔ_��̖�����������н��������̖������Ҫ��M����w�Ľy(t��ng)Ӌ���ԣ���Σ�h�ޞV�����]ϵ�y(t��ng)�����IJ��_���ԣ�ʹ��ϵ�y(t��ng)���и��õ������ԡ��@Щ��(y��u)�cʹ��h�ޞV�����о����ЏV���Č��H���Ãrֵ��
����ᘌ�ֱ��늄әCϵ�y(t��ng)�о����ŷ�ϵ�y(t��ng)��h�ޞV�����OӋ���}�������OӋ�˱����ܿ������������ɔ_���ɱ������r�£��o���˞V�������ڵij�֗l�����M�����OӋ��h�ޞV������
1���،���ģ
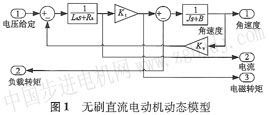
���،����ֱ��늄әC����ӑB(t��i)���̞飺
늘л�·늉�ƽ�ⷽ��ʽ��
ʽ�У�la�����@�M늸У�ra�����@�M��裻kv��늄ӄݳ������؞��D�����D�Ľ��ٶȡ�
�D��ƽ�ⷽ��ʽ��
ʽ�У�tem��늴��D�أ�t1��ؓ�d�D�أ�b������ϵ����j���D�ӑT����k1���D�س�����
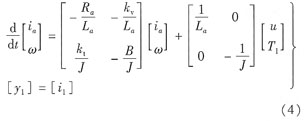
�����ϵ�ʽ�ɵõ��oˢֱ��늄әC�Ġ�B(t��i)���g������
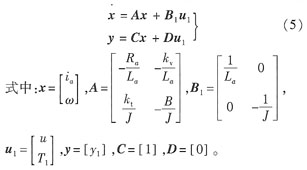
ʽ(4)���Ԍ����������ʽ��
�oˢֱ��늄әC�ӑB(t��i)�Y���D��D1��ʾ��
2ϵ�y(t��ng)�����ܿ������OӋ
���˱����OӋh�ޞV���������Ȍ�ϵ�y(t��ng)�OӋ�����ܿ����������IJ��à�B(t��i)��������ʹ�oˢֱ��늄әCϵ�y(t��ng)��(w��n)����������ɞ飺
u1=-kx ��6��
�����ܿ��ƵČ��|��Ҫ�OӋһ����������ʹ���]�h(hu��n)ϵ�y(t��ng)���H��������(w��n)���ģ����Ҿ���һ�����������ܡ����x��������ָ�ˣ�
���Й�ֵ���q�Ƿ�ؓ���ģ�r�������ġ��@���xȡ�����ܺ��������̎���ǿ��Թ�Ӌ�����^����������������Сֵ���ɴ��ڌ��H�����У��Ϳ��Ը����M������ָ�����Ƶ���С������ʽ�M�п��ơ����˵õ�****�����ɣ���Ҫ��ricatti���̣�
�Op��ʽ(8)�������⣬��ˣ�����ʽ(6)���ƣ� |