���ڹ̶�ʸ�����Õr�g������ֱ���D�ؿ���ϵ�y
���Gƽ1��犏���1���ں�ȫ2
(1����������W���������710048��2���dͨӍ�ɷ�����˾���������710065)
ժҪ������ͬ��늄әC���yֱ���D�ؿ��ƾ����D���}�Ӵ��_�P�l�ʲ��㶨��ȱ�c���ڷ������yֱ���D�ؿ����д�机��D���}�ӵĻ��A�ϣ����ù̶�ʸ�����Õr�g�ϳ���ʸ��������ֱ���D�ؿ��Ʒ�����������ͬ��늄әC��ԓ���������D�غʹ���`����x�����늉�ʸ������������朵�λ�ú��D���`��Ĵ���_�����x��Ļ���늉�ʸ�������Õr�g���Ķ��õ����µĺϳ�늉�ʸ���M�п��ơ�����Y���������ڹ̶�ʸ�����Õr�g������ֱ���D�ؿ��Ʒ����܉���Ч�pС���yֱ���D�ؿ��Ʒ����еĴ�机��D���}�ӣ�ͬ�r�����ӿ��Ƶď��s�ԣ����@������ϵ�y�Ŀ������ܡ�
�P�I�~��ֱ���D�ؿ��ƣ�����ͬ��늄әC���D���}�ӣ�늉�ʸ��
�ЈD���̖��TM341 �īI���R�a��A ���¾�̖��1004��7018(2010)04��0059��03
0�� ��
����ͬ��늄әC���и߹����ܶȺ��D�ؑT�Աȣ���ˏV�������ڸ�������ϵ�y��[1]������ͬ��늄әC�Ŀ��Ʒ�ʽ��Ҫ����ʸ�����ƺ�ֱ���D�ؿ��ơ��cʸ��������ȣ�ֱ���D�ؿ��ƾ��п��Ʒ�ʽ���Ρ��D��푑��졢���ڌ��Fȫ���ֻ��ă��c[2]������ֱ���D�ؿ���Ҳ�����D���}�Ӵ��_�P�l�ʲ��㶨��ȱ�c������S���W�������һЩ���M�������������xɢ���gʸ������[3]�����gʸ���{�Ʒ���[4-5]��ռ�ձȿ��Ʒ���[6]�ȣ��Ը��M���yֱ���D�ؿ��Ʒ����е��@Щȱ�c��
���ķ���������ͬ��늄әC���yֱ���D�ؿ����еĴ�机��D���}�ӵ�Ӱ����أ�Ԕ����B������������늉�ʸ�����ù̶�ʸ�����Õr�g�ϳ���ʸ��������ͬ��늄әC����ֱ���D�ؿ��Ʒ���������Matlab����ܛ����ԓ���Ʒ����M���˷��棬����Y�����������õķ���������Ч�pС���yֱ���D�ؿ����е��D�غʹ���}�ӡ�
1���yֱ���D�ؿ����еĴ�机��D���}�ӷ���
������ͬ��늄әC���yֱ���D�ؿ����У���机��D�صĿ����Dz��ô�机��D���h�������팍�F�ġ�����׃���ĸ����_�P�����У����x���늉�ʸ��һֱ������늙C����机��D��ʼ�K����һ������׃�������ڲ��Ü��h���ƣ������ֵ��С׃���_���o��ֵ�r��늉�ʸ����Ȼ�^�m���ã�ֱ�����ֵ�ʹ���~��ֵ���`���_����朜��h���ȣ��Ÿ�׃늉�ʸ��������ֻ�Ю����ο������ڽY���r����׃����������׃�_�P��B���D�صĿ��Ʒ�ʽҲ����ˣ���˴�机��D���}�ӕ��������O�����ݲ��������ʹ�机��D���}����һ��Ҫ������
1��1����}��
ֱ���D�ؿ����У�����늉��c��朵��Pϵʽ��
ʽ�У�us�鶨��늉�is�鶨���������s�鶨�Ӵ�朣�R�������ͬ��늄әC������衣ʽ(1)�xɢ������Ԍ��ɣ�
ʽ�У��ԣ��ɘӕr�g����һ���ɘӕr�g�ȴ�朵�׃��ֵ��
ʽ(3)�f���pС�ɘ����ڣ����׃��ֵ�͕��pС��ͬ�r������܉��������һ���ɘ����ڃ�������늙C��늉�ֵ����ôͬ�ӿ��ԜpС����}�ӡ�
1��2�D���}��
����ͬ��늄әC���D��Ӌ��ʽ��
ʽ�У��C������늙C���D�Ӵ�朣�p��늙C�O�������̣䡢��q��늸е�d��q�S�������Ğ鶨�D�Ӵ��֮�g�ĊA�ǡ�����s�㶨��׃�ݣ���ʽ(4)��ֱ�ڦ����֣��ɵ�
���D��׃����С�r���У�
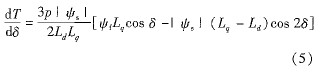
��늙C�\���^���У������׃������s��ؓ�d�Ǧ�Ҳ��׃������D1��ʾ���ӑB��r�£�ؓ�d�ǦĈD1���Ӵ�朄ӑB׃���D  |