���Ի���������������ͬ��늄әCʸ���������еđ���
���Թ�
(�Ϻ���ͨ��W���Ϻ�200230)
�ЈD���̖��tm341 �īI���R�a��e
��ͯ��̖��1004��7018(21110)04��0073��01
1����ͬ��늄әC����ģ��
��������ͬ��늄әC���Wģ��ǰ���������M��һЩ�O����
(1)��·�龀�������Һ��Դ�·ͣ�
(2)���Ų��ϲ���늣����Ų��ϵĴŌ��ʺͿ՚��еĴŌ�����ȣ���Ӌ�Ŝ��͜u���p�ģ�
(3)�D��iһ�]�������@�M���������@�M�иБ�늄ӄݲ��������Ҳ���
(4)늙C�Y����ʽ�����bʽ��������ͬ��늄әC���D�Ӵ�䓺�λ�Â������ı�����ܞ����Ҳ��Σ������@�M�ķ�늄ӄݲ��Ξ����Ҳ��Σ�Ҳ�������Ҳ���������ͬ��늄әC��
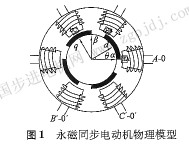
���bʽ��������ͬ��늄әC����ģ����D1��ʾ��
���˱��ⶨ���@�M����϶��ͨ�ܶȵ�Ӱ푣����C�y�����ȣ��茢܇��λ�Ùz�y����c늄әC�D�Ӵ�䓷��_�������c�D�Ӵ��ͬ�S���b������λ�Ùz�y��䓵ij��Ҳ���D�Ӵ�䓵ĘO�ԺͲ���һ�£�����λ�Ùz�y�b�õı����ͨ�ܶȞ����Ҳ��ֲ���λ�ô�䓺�늄әC�D�ӵİ��b��ʽ��D2��ʾ��
��D2��ʾ��λ�Ùz�y��䓺�늄әC�D�Ӵ�䓵����ľ����R��Ҳ����λ�Ùz�y�����ֱ�әz�y늄әC�D�ӴŘO�Ƕȣ�ͨ�^�z�y�c�D�Ӵ��ͬ�S��λ�ô�䓵Ĵ�ͨ�ܶȣ������Ի����z�y늉�ֵ��ݔ�뼯���ڔ���̎���·���a��d�D�Qݔ�룬�Ϳ���֪���D�ӵ�λ�æȺ͌����D�ӽǶȵ�������ֵ��������ܛ���OӋ�IJ���ȡ����w�ƌ����£�
�ڈD1�ľ��Ի���λ�Üy��������������늉���̖�M�ж��˺�ɵõ����£�
�D�Ӵ�䓿��gλ��늽Ƕ��cʽ(4)��ʽ(6)늉���̖�Ɍ����Pϵ���������늽ǶȾ����D��λ���c����a�ඨ���@�M�ĽǶ�ֵ��
2���Ի��������������D��λ�Â��������F늙Cʸ�����ƹ���ԭ��
��������mȻ���ֿ����·�����ܵĆ�Ƭ�C�·������ͬ��늄әC�ӿ������еõ��V�����ã������Ľ�B�IJ��þ��Ի����������Ľ�������ͬ���������F���Σ��c���D׃����+�����·�����D��λ�÷������^������ϵ�yӲ���ɱ��������c���ù��ʽ�D�ӂ�����ϵ�y���^�����гɱ������������ɿ��ȃ��c��ͬ�r���þ��Ի����D�ӂ��������F��ʸ����������ܛ���OӋ����Ҫ���Ӌ���D�ӽǶȌ���������ֵ��ܛ���_�NС���OӋ���Ρ�
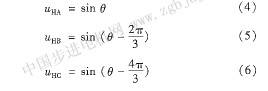
�����B���Ի����z�y�D�ӴŘOλ�Ì��Fʸ�����ƌ��F����������ͬ��늄әCʸ�����ƽY���D��D3��ʾ��
ʽ(8)�o�����D��λ�õ�������ֵ���m֥�һ���dsp���Ƭ�C�Ȳ���a��d�ɘ��·�����D���D����������ֵ��ֱ�Ӳɘӵõ���
��������ͬ��늄әCʸ��������Փ����ͬ��늄әC���ඨ���@�M�����ia��ib,ic�ͦ�-�µ�Ч��ֹ����ϵ������ia,i�¼��D��ͬ�����D����d-q�����id,iq֮�g���D�Q�Pϵ
����ͬ��늄әC���F�D�Ӵň�������ƺ��������bʽ�D������ͬ��늄әC��ֱ�S늸кͽ��S늸���ͬ���D��ݔ��늴��D�ؿɺ����飺
��ʽ(12)��֪��te��iq���@�f��ͨ�^�ň�����ʸ��׃�Q���Ƶ�ˮ��ͬ��늄әC늴��D�ؾ������õľ��Ϳɿ��
3����Y��
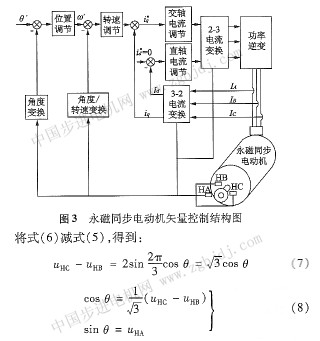
�o���D4�е�ֱ������id,iq����ʽ(11)�_����늄әC�����@�M���ia,ib,ic��Ҳ����ֱ���������˵��ཻ�����D���˵�׃�Q���������D�Q�Pϵ�������Wģ�ͣ�ͨ�^simulink���棬��C�þ��Ի������������F��������ͬ��늄әCʸ�����Ƶ���Ч�ԣ���D4��ʾ��
|