��ga������늙Cģ������ϵ�y�OӋ
��־��1���w�^��1������2
���Ϻ���ͨ��W���Ϻ�200240��2.�Ї��V�I��W������221008�ЈD���̖��tp273+��4 �īI���R�a��e
���¾�̖��1004��7018(2010104һ0074-112
0����
���y늙C���o����ϵ�y���ý�ֱ����Ͽ��ƣ�����Ԫ�����������࣬Ӱ�����ϵ�y����ʹ��ϵ�y�İ�ȫϵ���������͡�
��늄әC���ƽ�·�У����^��������p����Ƭ�l�Ꮭ�������o�����c���������^�����o�����ã��侫�_�Ⱥܵͣ������L��ʹ�û��ܵ������^�d�_���������ԕ��l���ܴ�׃���������l���`�ӻ�܄ӬF��
���IJ������T�ӹ�˾��simoc0ce pr0늄әC���o�������b�ã����ܝM����N���Ʒ�ʽ��Ҫ���֘O��غ����˿������]Ӌ����һ������ȡ������Ŀ���Ԫ�������ĸ����Ͻ�Q�˟��^����@һ�����ı��o�h����
1�������OӋ
���y���Ԅӿ��ƣ�����������Փ�ͬF��������Փ����һ����ͬ�����c�����������ľC���OӋ��Ҫ�����ڱ��،��_���Wģ�͵Ļ��A�������ڌ��H���I���a�У��ܶ�ϵ�y��Ӱ푌��غܶ࣬ʮ�֏��s���������_�Ĕ��Wģ���eͬ�y����ģ�����Ʋ���Ҫ�������Wģ�ͣ��������Hϵ�y��ݔ��ݔ���Y���������F�������ˆT�Ĺ���������Ԍ�ϵ�y�M�Ќ��r���ơ�ģ�������������ٶ��^�졢�����^���Լ������������еȃ��c�������ԘO����
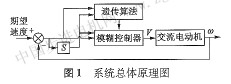
�ڱ��OӋ�У��҂������b��simocode es pr0fessional2004+su3ܛ������Xͨ�^pc��|�c������Ԫ���������B�Ӂ��ς������d���ăȲ�����Ķ��M��ϵ�y���OӋ���係�w�OӋ�D��1��ʾ��
�҂����]���{�����ď��s�ԺͿ��ƾ��ȵ�Ҫ���x����λ���`��`��׃���ʞ�ݔ��Ķ��Sģ�����������@�Ӽȱ����x��һ�S�������ĄӑB���ܲ��ѣ�Ҳ�����˲������Sģ�����������^�ڏ��s���y���OӋ��ռ��Ӌ��C�r�g�L�����r�Բ�ȱˡ����⣬Ҳ�������Ʋɘ��l����ߣ���ֱ��Ӱ푿��ƾ��ȣ������_lצ���M�����ܡ�
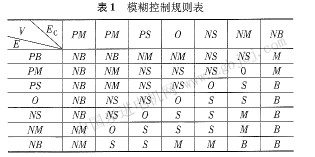
��e��ec�քe���������`��׃���ʵ��Z��׃����p����늉��o�����Z��׃����x��r����D�����������ģ������Ҏ�t���1��ʾ��
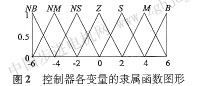
����ݔ��ƫ��e�c�`��׃��e����Փ����飺[6��һ5��һ4��3��2��l��o��1��2��3��4��5��6]�����ڴ�Փ���϶��xģ������7����{nb��nm��ns��z��s��m��b}��
�`�ٺ����������������`��𮔵�����������׃�����`�ٺ����D����D2��ʾ��
늙C��ģ�����Ʊ텢���҂����������O��n����ʼ���������ɳ�ʼȺ�w�����е��z���㷨�����»������E��
(1)k=o���S�C�a��i���������ɳ�ʼȺ�w��
(2)Ӌ��������m����(ֵ)fi��i=1��2�� ��n��
(3)���²��E�a���µ�Ⱥ�w��ֱ����Ⱥ�w�д��Ŀ����_��n��
���Ը���  ��Ⱥ�w���x���ɂ���si��sj�� ���Ը���pc��si��sj�M�н��Q���õ��µĴ�si��sj��
���Ը���pmʹsi��sj���еĸ�λ�a��ͻ׃��
(4)k=k+1�����ص�2����
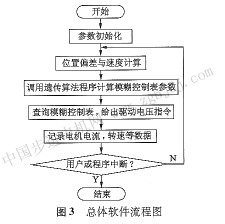
��ϵ�y�Ŀ��wܛ���OӋ���̈D��D3��ʾ����늙C��ģ�����Ʊ��γ��^���У���һ�Εr�g�o��늙C��ͬ���ٶȣ��Ը����ɼ�����늙C�D��׃������ͨ�^�z���㷨���ֵij����Ԅ�Ӌ���������������****���Y����Ȼ��������������^�鷀���r�����Ԍ��z���㷨�������ֳ������^���У�ʹϵ�y�ɞ�μ�ģ������ϵ�y���Ķ��_���ӿ���λ�C�\���ٶȣ��p�ٿ����������OӋ���˹��_֧�����á�
2ϵ�y�yԇ
�x�Üyԇ늄әC��zjdl20��42 8��1 200 kw��늘�늉�660 v���~�����1 950 a���~���D��400r��min���^�d����2 o�����늉�63 v��������88 2 a���ň����o.716 �أ���
�Ż�·�r������o 992 s��늘��D�ӑT��37 356 kn��m |