����Б�늄әC�Ě�϶�ń��C������
��Ρ1��2
��1�A�пƼ���W늚��c��ӹ��̌WԺ����h4300742��܊���̴�W늚��c��Ϣ���̌WԺ����h430033��
ժҪ�������@�M��������������Б�늄әC�����@�M�����ҷֲ�����������Ͷ̾�ֲ�����ʽ�r��϶�ń��C���ķֲ����ڴ˻��A�Ϻ���ӑՓ����������늙C���Wģ�͡����ڶ���늙C�����D�ش����@�M�ֲ��ͼ�����ʽ�`������c����Ȃ��y����늙C�䃞�c�@����
�P�I�~������Б�늄әC����϶�ń��C�����@�M���������Wģ��
�ЈD���̖��tm343 �īI��־�a��a ���¾�̖��1001-6848{ 2010��02-0005-04
0����
�Б�늄әC��϶�Юa���C���ńӄ���Ҫ�������ɂ�ԭ��
�ل��늉���������������ң����Еr�g�C������
���@�M�ڿ��g�ķֲ������ҡ��@�ɂ����ع�ͬ���îa�����C���Q��r���C����m���C������������ġ��ο��g�C��ӛ��(m��n)�Εr���C�����r���C���ķֲ��c늙C�Ĕ��Wģ���������P�������\����������ҪӰ푣������б�Ҫ����������@���Զ���Б�늄әC�����о�����
l�����@�M�����ҷֲ�
�ȏĺ�����r�_ʼ����늙C�����@�M���ҷֲ����˕r���Բ����]���g�C����Ӱ푣��H�Џ�׃�Q��ݔ�뵽늙C�ĕr�g�C�����ڽ���늙C���Wģ�͕r�������]�ň�ͣ��t�����Ϻ���ͨ����Б�늄әC���ƣ�����ͨ�^�D�Q��ꇰ�׃������Ȼ����ϵ�D�Q���������D��dqz12223����ϵ�У����M��ʸ�����ơ�
��5��늙C����M�н�ģ������Ȼ����ϵ�еķ��̺�3���̓늄әC���ƣ������늙C׃������Ȼ����ϵ�D�Q���������Ddqz,2223����ϵ���D�Q��ꇣ�p����dqz12223����ϵ�Ŀ��g�Ƕȡ�
������׃���M���D�Q����
ʽ��f�ɴ���늉�u,i���������朦ˡ����D��׃���M���D�Q����
ʽ�У���r���D�ӵĿ��g�Ƕȡ����ǿɵ�5��늙C���������D����ϵ�µķ��̣������īI[2]�õ��ĸ����̺���ͨ����Б�늄әC��ȫһ�ӡ������=0�������D�Ӵ�朶�λ��������3��늙C��ʸ�����Ʒ���������늙C�M�п��ơ�
2�����@�M�鼯��������ʽ
�����¼��O��
��늙C�����ڿ��d�ķ�����B��
�ں��Դ�·ͣ����S�ň��įB�ӣ�
�۶��ӌ������C���l���µļ��wЧ�������ԡ�����3�늙C���������ٌ������ƏV������늙C���M�б��^���ڱ��^�rע�⌢��늙C����ͬ�Ķ����~�ĺ͚�϶��ͨ�ܶȷ�ֵ����ǰ��l����
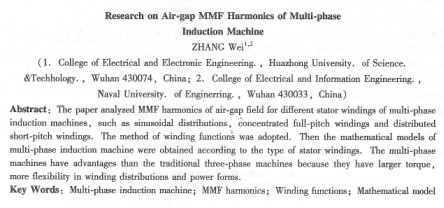
3����ÿһ�ඨ�ӵ��@�M������D1���������ĸ����~�����飺
ʽ�У����Ƕ��Ӹ���֮�g�Ŀ��g�Ƕȡ������@�M�����ڿ��g���Q������ż���ο��g�C�������ڡ���늙C���������׃��( csi)�ӣ��tÿһ���Ӿ�Ȧ���^�ʾ��ε������ԓ�����չ�_�鸶���~������
ʽ�У���=��t����������Ƕȡ���������Č��Q�ԣ�ż��������C�������ڡ���f��ʾ3���@�M�a���Ŀ��ńݣ��t
��ʽ�а����˃ɲ��֣�ǰһ�����������D�ň�����һ���Ƿ������D�ň������˿��ƌ���3��늙C�ĕr���C���ֲ����1��
��1�е���̖�����������D�ń�( mmf)��̖ؓ�t�������D�� |