�в�����늙C����Ԫ���m������
����ꖣ�ʷ���ƣ�������
�����ϿƼ���W�Ԅӻ�ϵ�����471003��
ժҪ�����ڳ���늙C���зǾ��ԡ��r׃�ԡ�����ϵ����c�����������Ŀ����y�ȣ�����pid�ȳ�Ҏ���Ʒ����y�ԝM���^�߾��ȵĿ���������Ԫ����һ�N�W�j������ʽ�������ԌW�������m���������������ڌ��F���OӋ�˻��ڵ��lpwm�����Ć���Ԫ���m��pid�D�ٿ��Ʋ��ԣ������˳���늙C���m���]�h�����b�á���һ���̶��Ͻ�Q���ypid�{���������ھ����r�����������y�ڌ����s���ƌ����M����Ч���ƵIJ��㡣����C����ԓ����ϵ�y����푑�Ѹ�١��m���ԏ��ȃ��c��
�P�I�~������늙C������Ԫ�����m�����ƣ����lpwm
��Ȧ���̖��tm359.9 �īI��־�a��a ���¾�̖��100l-6848��2,010��02-0044-03
0�� ��
����늙C( usm)��һ�N������늙C�������䲻ͬ�ڂ��y늙C���T�����c��ʹ���ڷ��B�m�\�Ӽ������\�ӿ����I����ЏV韵đ���ǰ��������늙C���Ƀ����ֵ��ȡ���λ��һ���90�ȵĸ��l����늉��ӵġ��ӿ��Ɔ�Ԫ������ֱ��Ӱ푳���늙C�����ܣ�ģ�������m�����W�j�ȿ��Ʒ��������ё����ڳ���늙C���ơ�
���lpwm���Ʒ�ʽ�dz���늙C���Ƶ�һϡ��˼·��������ͨ�^��׃늙Cݔ��늉����l�ʡ���ֵ����λ�팍�F�D�ٿ��NĿ�ģ����Dz�����늉���ͨ����ƣ��܉�늙C�����^�̵ķǾ����Pϵ�����IJ����@�N���Ʒ�ʽ�����F�˳���늙C�D�ٿ���ϵ�y�����ڳ���늙C���D���cݔ����������зǾ����Pϵ�͕r׃�ԣ����Â��ypid���Ʋ���ȡ�úܺõĿ���Ч��������Ԫ���阋���W�j�Ļ�����λ�������ԌW�������m�����������ҽY�����Ρ������ھ����F�����y��pid�{����Ҳ���нY�����Ρ��{����������c���������ھ����r�������������IJ��Æ���Ԫ���m��pid�����㷨���уɷN���Ʋ��Եă��c�Y�������OӋ�˳���늙C�D�ٿ����b�ã������ϵ�y���m�������������˿���Ч����
1�ӿ���ϵ�y
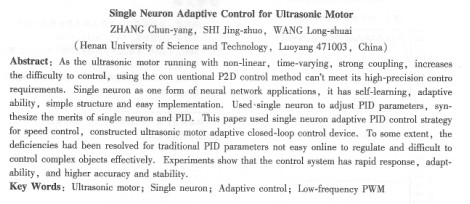
���ĸ�������늙C����Ҫ���OӋ��һ�N����ֱ�Ӕ��ֺϳɼ��g( dds)�ij���늙C�ӿ��������Y����D��D1��ʾ����dsp����ĵĿ��Ɔ�Ԫ��Ҫ���F���ơ�Ӌ��͔����IJɼ����ܣ���cpld����ĵĈ��І�Ԫ������̖�l����������dsp�Ă��͵�ָ������a������늙C�в�����늙C����Ԫ���m�����Ə���ꖣ��������pwm��̖�����ӆ�Ԫ���F����·���Qpwm��̖�����ڃ���������׃�·��ƥ���·��ݔ������һ����ֵ���l�ʺ���λ��ă�������늉��ӳ���늙C��cpld���OӋ��spiͨӍ�˿ڣ�dds��̖�l�������l�ʡ���λ����ֵ������ͨ�^dsp��spi�˿��M��ͨӍ��������dsp�ă�λͨ��gpio������dds�l�ʡ���λ���ֵ�����ֵ��x��ˣ����R�e���Ϳ����ֵ���͡�
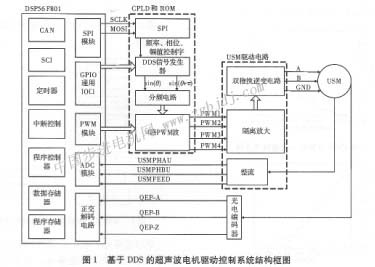
�D2�o���˻���dds�Č��Qpwm��̖�l����Ԫ��ԭ��D��ͨ�^�O��dsp��pwmģ�Kģֵ�Ĵ���pwmcm��Ӌ��ֵ�Ĵ���pwmval����dsp�a���ĵ��lpwm��̖����pwm���c���Qpwm��̖���c�����Ɍ��F���lpwmͨ����ơ�
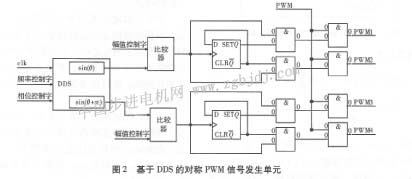
�D3���D4�քe�o����ԓ�ӿ���ϵ�y���l��һ�D�١����lpwmռ�ձ�һ�D������������
2����Ԫ���m�����ƽY��
���y����ʽpi�{�������㷨��
���ڂ��y��pi����pid�{�������䅢���ڳ�ʼ���r�ѽ��O�úã��������ھ���������ˮ����ƌ���l��׃���r���Ͳ��܌����ƌ����M�кܺõĸ�ۙ�����IJ��Æ���Ԫ���m���㷨�팍�Fpid�������ھ��{��������ʹpid�{�����ą����S���،����׃����׃�����@��������Ԫ�����ԌW�����裬���\���п��Ը������،����׃��������Ԫ�ę�ֵ�M���{����ʹ��pid�������������m�����ܡ�
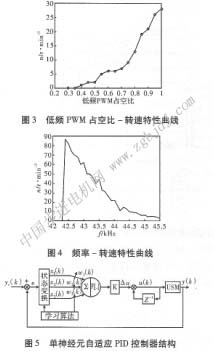
����Ԫ���m��pid�Y����D��D5��ʾ���D��yr(k)��y(k)�քe����� |