ֱ���D�ؿ���ϵ�y�ăɷN�ٶȹ�Ӌ�����^�о�
�����£��Y����
����������WԺ늚���c�Ԅӻ�ϵ�����471023��
ժҪ������ȫ�A����]�h�^�y���Ԍ��Fֱ���D�ؿ���ϵ�y���Ӵ�朵Ĝʴ_�^�y���ڴ˻��A���ƌ��˃ɷN�ٶȹ�Ӌ�������������ɷN�ٶȹ�Ӌ�����ȷ���͌�����͌��Y������������ģ�ͅ������m����Փ�OӋ�����ٶȹ�Ӌ������������Z����Փ������ٶȹ�Ӌ�����R�ٶ��Ք��죬�ӑB���ܸ��á�
�P�I�~�������Б�늄әC��ֱ���D�ؿ��ƣ��ٶȹ�Ӌ�̣�ģ�ͅ������m��
�ЈD���̖��tp271 �īI��־�a��a ���¾�̖��1001-6848{2010)02-0066-04
o�� ��
���˝M������ܽ������ӵ���Ҫ����Ҫ���ٶ��M���]�h���ƣ����ٶȂ������İ��b������ϵ�y�ď��s�ԣ�������ϵ�y�Ŀɿ��Ժ�ϵ�y�������ԣ���������ϵ�y�ɱ��;S�oҪ����ˣ����ßo�ٶȂ������ѽ���δ�������{�ٰlչ�ı�Ȼڅ�ݡ���ֱ���D�ؿ���ϵ�y�У�����ȫ�A����]�h�^�y��ȡ�����y�ķe����������ˌ����Ӵ�朵��^�y���ȣ�ͬ�r���ӌ�늙C�����������ԡ���ȫ�A����]�h�^�y���Ļ��A�ϣ��OӋ�˃ɷN�ٶȹ�Ӌ����һ�N����������Z����Փ�OӋ�����ٶȹ�Ӌ�^�y�����ڶ��N������ģ�ͅ������m����Փ�OӋ�����ٶ����m���^�y��������matlab���ɷN�ٶȹ�Ӌ��ֱ���D�ؿ���ϵ�y�M���˷��挍�F��ͬ�r���M�Ќ��������ͷ���Y���M���ˌ��ȷ�����
1 ֱ���D�ؿ���ϵ�yȫ�A����]�h�^�y���ĄӑB���Wģ��
1��1����늄әC�ڃ����oֹ����ϵ�µĄӑB���Wģ��
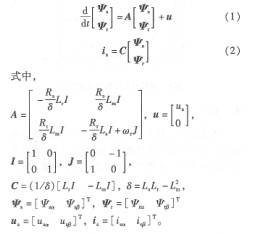
�Զ����D�Ӵ�朞��B׃���ľ����ʽ늄әC���Wģ�����£�
늴��D�ر�ʾ�飺
1. 2ȫ�A����]�h�^�y���ĄӑB���Wģ��
ͨ�^ʽ(1)��ʽ(2)�������Į���늄әC�����ʽ늙C���Wģ��һ��B���̣����Ԙ����ͬ�r�^�y���Ӵ�机Ͷ��������ȫ�A��朠�B�^�y��[4]��
�@�
�������_ʽ�У������^�y���Ĺ�Ӌֵ��u�Ǡ�B�^�y����ݔ�룬ݔ����is��k�����^�y�������ꇡ��^�y�������һ��ǰ����^�y���ݔ���c늙C�挍���ݔ��������헡�������k�ә��ꇵ����ã����������^�y���õĶ����D�Ӵ�朠�B׃�������^�y��ģ��ʹ�õľ��a�͌��Hϵ�y�ľ��a֮�g���ڲ�r����Ȼ�������^�y��ݔ���c���Hݔ��֮�g����ƫ��ڴ���r�£�ԓ���ӵ�����헌��Mһ��У���@ЩӰ푡���ʽ���^�y�������ÿ��Ա�ʾ�����¾����ʽ��
2�ɷN�ٶȹ�Ӌ��
2.1��������Z����Փ���ٶȹ�Ӌ��
�D�٦ئ��ǙCе׃���������Cе�D�٦ئ�׃���h�h�������׃�����ٶȕr�����Ԍ��Cе�D�٦ئ�ҕ�����������ˣ���������Z����Փ�ƌ����D�٦ئ����m���Ք��ʣ���ʹϵ�y���ַ�����
�D1���������Z����Փ���ٶȹ�Ӌ��ϵ�y��D�����]����Ӌ�D���c���H�D��֮�g���ڵ�ƫ������D�Ӵ�朌��Hֵ�c����ֵ֮�g�ĄӑB�`��̿���ͨ�^늄әC��B�����cȫ�A��朠�B�^�y���IJ�ֵ����ʽ(1)�pȥʽ(4)Ӌ��õ���
aa���`���ꇣ�
|