�ھ�C(j��)܉�E��ۙ�Ļ�ģ׃�Y(ji��)��(g��u)����
�S��骣��
����ɽ��W(xu��)���I(y��)Ӌ(j��)��C(j��)���ƹ��̺ӱ�ʡ���c(di��n)��(sh��)�(y��n)�ң��ӱ��ػʍu066004��
ժ Ҫ����(du��)Һ���ھ�C(j��)�����b�õ�܉�E��ۙ�M(j��n)�����о����ڷ�����Һ���ھ�C(j��)�����b�õĄ�(d��ng)���W(xu��)���̵Ļ��A(ch��)�ϣ�ᘌ�(du��)���(f��)�s�ķǾ�(xi��n)�ԣ������һ�N�µ�Һ���ھ�C(j��)�����b��܉�E��ۙ����������(y��ng)�ÙC(j��)���ˌW(xu��)��Փ�������������ɶ�Һ���ھ�C(j��)�����b�õ��������Մ�(d��ng)���W(xu��)ģ�ͣ��O(sh��)Ӌ(j��)�ˎ���ͨ�V�����Ļ�ģ�����������õ�ͨ�V�����ĞV�����l��̖(h��o)�Ĺ��ܣ�����������̖(h��o)�Ķ���(d��ng)���o����Ҏ(gu��)��܉�E��������Ŀ����������o���˿���ϵ�y(t��ng)���O(sh��)Ӌ(j��)��������(du��)�����ɶȹ����b���M(j��n)���˷����о�����Y(ji��)�����������O(sh��)Ӌ(j��)�Ŀ�������(du��)�O(sh��)��܉�E�ĸ�ۙ�������õĄ�(d��ng)�B(t��i)���ԣ���(du��)ϵ�y(t��ng)�IJ��_���Ծ����^��(qi��ng)�������ԣ��ڴ���ģ���`����ⲿ�_��(d��ng)����r�£�ԓ���������_(d��)���߾��ȿ��ٸ�ۙ��Ŀ�ģ�����������ģ���ƵĶ���(d��ng)��(w��n)�}��
�P(gu��n)�I�~��Һ���ھ�C(j��)����(d��ng)���W(xu��)���̣���ģ���ƣ�܉�E��ۙ
�ЈD���(l��i)̖(h��o)��tp 24 �īI(xi��n)��(bi��o)�R(sh��)�a��a
1�� ��
Һ���ھ�C(j��)��һ�N�V����(y��ng)���ڵVɽ���������ИI(y��)����Ҫ�b�䡣�S��Ӌ(j��)��C(j��)���g(sh��)�İl(f��)չ���ھ�C(j��)����څ���ڙC(j��)���˻�����(du��)�ٿvϵ�y(t��ng)�Ŀ���Ҳ����˸��ߵ�Ҫ����Ό�(sh��)�F(xi��n)ƽ��(w��n)�߾��ȵ�܉�E��ۙ�ѳɞ��ھ�C(j��)�����Ԅ�(d��ng)����һ��(g��)�P(gu��n)�I��(w��n)�}����(du��)���ھ�C(j��)���ˁ�(l��i)�f(shu��)�������ⲿ�ɔ_��δ֪����(sh��)�������ď�(qi��ng)�Ǿ�(xi��n)�Ե����أ����y�õ����_ģ�ͣ�������о��ھ�C(j��)���˵�܉�E��ۙ�r(sh��)����ģ׃�Y(ji��)��(g��u)������һ�N�����������ķ�������ģ׃�Y(ji��)��(g��u)������һ�N�Ǿ�(xi��n)�Կ��Ʋ��ԣ������Ժ�(ji��n)�εĿ���Ҏ(gu��)�Ɍ�(sh��)�F(xi��n)��(d��ng)�B(t��i)�ͷ�(w��n)�B(t��i)����֮�gì�ܵąf(xi��)�{(di��o)������������(du��)�_��(d��ng)�ͅ���(sh��)׃�����������Լ��M(j��n)�뻬��(d��ng)ģ�\(y��n)��(d��ng)�����ȫ���m��(y��ng)�ԣ�ʹ�û�ģ���ƏV����(y��ng)���ڷǾ�(xi��n)��ϵ�y(t��ng)�����������С����@�N��������ͨ�^(gu��)���N����ģʽ֮�g�ĸ��l�ГQ��(l��i)��(sh��)�F(xi��n)�ģ����ڿ�����̖(h��o)��ͻ׃���@���ǻ�ģ׃�Y(ji��)��(g��u)����ϵ�y(t��ng)�еĶ���F(xi��n)�����p�t��(hu��)������(zh��)�в����ęC(j��)еĥ�p���t��(hu��)����(l��)δ��ģ�ĸ��l��(d��ng)�B(t��i)푑�(y��ng)����ʹ����ʧЧ��
���Q��ģ׃�Y(ji��)��(g��u)�����г��F(xi��n)�Ķ���F(xi��n)��(gu��)��(n��i)��W(xu��)���ѽ�(j��ng)�����һЩ��Q������magdym��a(ch��n)bdelhameed�����һ�Nģ����ģ���Ʒ�������(sh��)�F(xi��n)�ˌ�(du��)܉�E�Ŀ��پ��_��ۙ����Ч�������˶���F(xi��n)��fang-ming yu,hung-yuan chung,shi-yuanchen���O(sh��)Ӌ(j��)��ģ����ģ������Ҳ�ܺõؽ�Q�˷Ǿ�(xi��n)��ݔ�벻�_���r(sh��)��ϵ�y(t��ng)�Ķ���(w��n)�}��basilm��hadithi�������ڻ���(d��ng)���θ�������һ߅��ӣ�����ͺ���(sh��)�����_(k��i)�P(gu��n)����(sh��)�ķ�����Q�˻�ģ�������q��Ć�(w��n)�}�����У����õ����ڻ���(d��ng)���θ�������һ߅��ӣ�����ͺ���(sh��)�����_(k��i)�P(gu��n)����(sh��)���Q(ch��ng)֮�顰߅��ӡ��������Еr(sh��)����ͺ���(sh��)��ϵ�y(t��ng)׃���B�m(x��)ϵ�y(t��ng)������׃�Y(ji��)��(g��u)ϵ�y(t��ng)��
��ˣ����IJ���һ�N���ڎ���ͨ�V���Ļ�ģ׃�Y(ji��)��(g��u)���Ɓ�(l��i)��(sh��)�F(xi��n)�������ƶ���(d��ng)�����ڻ�ģ������ݔ���˼����ͨ�V�������Ɍ����l���������̖(h��o)�M(j��n)����Ч�ĞV����
2Һ���ھ�C(j��)���P(gu��n)��(ji��)�����۵��������Մ�(d��ng)���W(xu��)ģ��
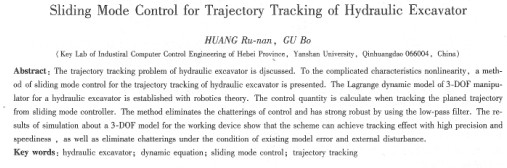
�ھ�C(j��)�����b����Ҫ�Ʉ�(d��ng)�ۡ��^�U���P���M�������ɶșC(j��)��(g��u)��
����(bi��o)��(zh��n)d-h����������(l��i)������(bi��o)ϵ����Dl��ʾ��
�D�Є�(d��ng)�ۡ����U���P�����|(zh��)����m1��m2��m3���L(zh��ng)�Ȟ�l1��l2��l3���D(zhu��n)�Ǟ��1����2����3��r1��r2��r3���P(gu��n)��(ji��)�(q��)��(d��ng)���أ�g���������ٶȡ����=[��1����2����3]t���t�����۵Ą�(d��ng)���W(xu��)ģ�͞�
3��ģ׃�Y(ji��)��(g��u)���������O(sh��)Ӌ(j��)
����ʽ(1)��һ��(g��)��(f��)�s�ķǾ�(xi��n)��ϵ�y(t��ng)�����ж��c(di��n)ؓ(f��)�m3����һ��������(n��i)׃���IJ��_��������(du��)���@�ӵď�(f��)�s����ϵ�y(t��ng)��Ҫ��(du��)���ۙ܉�E���ƣ����IJ���һ�N���ڎ���ͨ�V���Ļ�ģ׃�Y(ji��)��(g��u)���Ɓ�(l��i)��(sh��)�F(xi��n)��������(d��ng)���ƣ����ڻ�ģ������ݔ���˼����ͨ�V�������Ɍ����l���������̖(h��o)�M(j��n)����Ч�ĞV�������ڵ�ͨ�V�����Ļ�ģ����ϵ�y(t��ng)�Y(ji��)��(g��u)����D2��ʾ��
|