�oˢֱ��늄әC�ز���ʽ�c늴��D���}���Pϵ
�R���������l������־��
(�������I��W���������7101291
ժҪ���ԓQ���^���@�M�Ľyһ�ԑB���̞���A���yһ���ƽ������_���ڔز���ʽ�µēQ���^��늴��D�أ��������˽�����ʽӰ��D���}�ӵĸ���ԭ����Փk�õ���****�Ĕز���ʽ��ͬ�r�������N�ز���ʽ�ēQ���r��늴��D�طքe�M����Ӌ����^����Y���c��Փ����һ�£������Ŀǰ���µĔز���ʽ���a���������D���}�ӵ�Ӱ��ṩ����Փ�����ͱ��_ʽӋ�㡣���ó����D���}��****�Ĕز���ʽ��PWM-ON-PWM����������λ�Â������ėl���\��λ���A�y�����F��ԇ�Y��������PWM ON PWM���D���}����С��Ŀ�]�в���ͨ�������
�P�I�~���oˢֱ��늄әC���ز���ʽ���D���}�ӣ�PWM-ON��PWM
�ЈD���̖��TM33 �īI���R�a��A ���¾d̖��1004-7018(2010)05��0012��04
0����
�������β���늄ӄݵğoˢֱ��늄әC���и߹����ܶȡ����ƺ��ε����c�����÷dz��V��.��������늴��D���}�ӆ��}�Լ��ɴ���ɵĿ������܆��}�����������ڸ߶�λ���ȡ��߷����ԵȈ��ϵđ���[1]������׃��������������ӽY�����@�M�����������B�Ӄ�����ͨ����B��ʽ��һ�����ˢPWM�{�Ʒ�ʽ�M���ٶȼ�������{�������õ�PWM�{�Ʒ�ʽ��ͬ���䌦���ܵ�Ӱ�Ҳ��ͬ��
�oˢ늄әC�D���}�ӵ����Ƽ��������ܵĸ���һֱ���о��ğ��c�����īI[11]�У����oˢֱ��늄әC���ز�����r�µ�������o���˽���Ӌ�㡣�īI[2]���N�ز���ʽ�ēQ���^��늴��D�طքe�M����Ӌ�㡣�īI[3]����������ͨ����������һ�NPWM��ON��PwM�ز���ʽ�����@�N�ز���ʽ��Ҫ6���������������īI[4��5]�����һ�N�ɱ���ߘO�ޔز��l�ʵĔز������������Խyһ�Ġ�B���̽���Ӌ����Ŀǰ���F�ĸ��N�ز���ʽ�µ��D���}�ӱ��_ʽ,�������˔ز���ʽ�c�D���}�Ӵ�С�ĸ���ϵ�������λ���A�y���o����һ�NPWM-ON��PWM�ز���ʽ�Č��F������
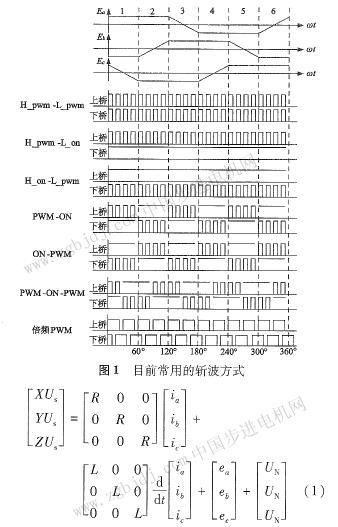
Ŀǰ��늙C����ͨ���������N�{�Ʒ�ʽ���o�ز�(���{�ƻ������{�Ʒ�ʽռ�ձȞ�1�r)��H_pwm-1һL pwm��H oD��L��pwm��H��pwm��L oil��PWM��ON��ON��PWM����������� PWM��ON��PWMi�������lPWM�{�Ʒ����ȣ����N�ز���ʽ�c��늄ӄݲ�����D1��ʾ��
1�Q���^�̽yһ늉�ƽ�ⷽ�̵Ľ�����늴��D�صĽ������_
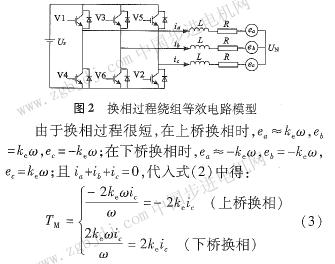
�����f�����Σ���AC��ͨ�QBc��ͨ�ēQ���^�������о�����E��Q���r��A+cһ�Q��B+Cһ����Q���r��A��c+�Q��B��c+���о����O�ėl����늙C�������Q�҅�����ȣ�늙C���������120�����η�늄ӄݣ����Դ��늙C��Ч�·��D2��ʾ���Q���^�̵���ʼ��A�������_ʼ˥�p��ͬ�rB�������_ʼ���ӣ�ֱ��4������˥�p���㣬�Q���^�̽Y�����ɴ˿�Ҋ���ړQ���^���������@�M����������ڡ���ˣ������D2���@�M��Ч�·ģ�Ϳ��Խ��������µ�늙C�����늉�ƽ�ⷽ�̣�
ʽ�У�Us��ֱ����늉���x��y��Z�քeÿ���@�M�ڲ�ͬ�ز���ʽ�µĵ�Ч늉�ϵ������ֵ���ڵ�Ч늉�����Us��ea��eb��ec�͞������@�M��늄ݣ�ia��ib,ic�������@�M�����R��L�քe��ʾÿ���@�M������늸�(늸О�ÿ���Ը��c���еIJ�ֵ)������늙C�yһ��Փ��늙C늴��D�ؿɱ�ʾ�飺
ʽ�У�TM��늙C�D�أ�Pe��늴Ź��ʣ�����늙C�Cе���l�ʣ��؞�늙C�D��늽��l�ʣ�P��O������
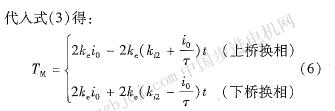
��ʽ(3)�ɵã�늙C�Q���^��늴��D���c�ǓQ���@�M����������ȣ���׃��څ����ͬ��
2�ɽyһ�D�ر��_ʽ�����ز���ʽ��늴��D�ص�Ӱ�
�������Ľ������_ʽ���Եó������κΔز���ʽ�£�ֻҪӋ���kilֵ���Ϳ��Խ��ƽ������Q���^�̽Y���ĕr�g��ֻҪӋ���k i2ֵ���Ϳ��Խ��ƽ�����늴��D�صĴ�С���ڲ�ͬ�Ĕز��� |