��݆ݞ늄�(d��ng)�C(j��)С܇(ch��)��Ӳ���ϵ�y(t��ng)�о�
������x���R �������ϼ
(�ɱ�����W(xu��)���������710072)
ժҪ��ͨ�^(gu��)��(du��)늙C(j��)�(q��)��(d��ng)��Փ�����y(t��ng)��Ӳ��ٷ����M(j��n)�з�������(du��)�o(w��)�����SС܇(ch��)����˻��ڃ�݆ݞ늄�(d��ng)�C(j��)�(q��)��(d��ng)����Ӳ���ϵ�y(t��ng)�O(sh��)Ӌ(j��)���o���˿��������w�O(sh��)Ӌ(j��)˼·������С܇(ch��)��Ӳ����D(zhu��n)��ģ�ͣ�Ӌ(j��)��늲����^(gu��)�����S���D(zhu��n)��Ƕ�׃����(n��i)��܇(ch��)݆���D(zhu��n)�٣�ͬ�r(sh��)��(du��)С܇(ch��)����ǰ�M(j��n)���Ӝp���\(y��n)�еȠ�B(t��i)�µ���Ӳ���ģʽ�M(j��n)�з������_�����w�\(y��n)�Р�B(t��i)�µĿ��Ʋ��ԡ���(du��)���_(t��i)55 w���Č�(du��)�O늙C(j��)�M(j��n)���˷�������Ϳ��d��(sh��)�(y��n)����(sh��)�(y��n)�Y(ji��)��������С܇(ch��)�������O(sh��)Ӌ(j��)��������Ӳ���ģ�����_�����Ʋ��Կ��С�
�P(gu��n)�I�~����Ӳ��٣��o(w��)ˢֱ��݆ݞ늄�(d��ng)�C(j��)�����Ʋ���
�ЈD���̖(h��o)��TM33 �īI(xi��n)��(bi��o)�R(sh��)�a��A ���¾�̖(h��o)��1004��7018(2010)05-0022-03
0�� ��
��Ӳ���(���º�(ji��n)�QED)��һ�N��ȫ��늿ط�ʽ���Ƹ���(g��)܇(ch��)݆���D(zhu��n)�٣�ʹ܇(ch��)݆�Բ�ͬ�ٶ��D(zhu��n)��(d��ng)�����_(d��)���D(zhu��n)���Ŀ�ģ�ͬ�r(sh��)���C܇(ch��)݆���l(f��)������(d��ng)�����ƣ������L��(d��ng)�\(y��n)�еļ��g(sh��)���ڟo(w��)�����SС܇(ch��)���D(zhu��n)��ϵ�y(t��ng)�в�����Ӳ��ٿ���ϵ�y(t��ng)��ȡ�����D(zhu��n)��P(p��n)���D(zhu��n)��܇(ch��)݆֮�g�ęC(j��)е�B�ӣ������D(zhu��n)�����ָ���ʹ����Ӿ�·���ƃ�(n��i)��܇(ch��)݆֮�g���ٶȲ��(sh��)�F(xi��n)�D(zhu��n)��(du��)��늙C(j��)�(q��)��(d��ng)����ϵ�y(t��ng)��Ŀǰ��(j��ng)�������(q��)��(d��ng)늙C(j��)�c�p�������B�َ���(d��ng)܇(ch��)݆�ķ�ʽ��܇(ch��)݆�ٶȵ�Ӌ(j��)����ͨ�^(gu��)��(du��)һϵ�Мp�����Ĝp�ٱ�Ӌ(j��)�㣬���ܵõ���늙C(j��)�D(zhu��n)��֮�g���P(gu��n)ϵ���@�N��(f��)�s��Ӌ(j��)�㷽����(du��)�ڟo(w��)�����SС܇(ch��)��ʧ����ӿ��ƵČ�(sh��)�r(sh��)�ԣ����늙C(j��)�D(zhu��n)�ٺ�܇(ch��)݆�D(zhu��n)���܉�(sh��)�r(sh��)һ�£���Ӳ��ٵĹ��ܾͿ��Եõ�****���w�F(xi��n)���������С܇(ch��)���S���`���Ժ��\(y��n)��Ч�ʣ�ͬ�r(sh��)�����������fЧ�ʺ�܇(ch��)�w���g���Ƶȿ��]�����IJ��Ã�݆ݞ늄�(d��ng)�C(j��)�(q��)��(d��ng)��ʽ��늄�(d��ng)�C(j��)���b��܇(ch��)݆��݆ݞ��(n��i)��ݔ���D(zhu��n)��ֱ�ӂ�ݔ?sh��)��?ch��)݆���ᗉ�˂��y(t��ng)���x�������p����������(d��ng)�������șC(j��)е������ʹ��܇(ch��)�����p�p�������˙C(j��)е����(d��ng)�p��[1-2]��ֱ��ʹ��݆ݞ늄�(d��ng)�C(j��)�ṩ�D(zhu��n)���(d��ng)����ͬ�ӹ���Ҫ��r(sh��)���(q��)��(d��ng)���ʿ����ɶ���(g��)늄�(d��ng)�C(j��)�ṩ�������ˆ�(g��)�(q��)��(d��ng)늄�(d��ng)�C(j��)�Ĺ��ʣ��M(j��n)�����͌�(du��)����������Ҫ���Ԍ�(du��)����(g��)�(q��)��(d��ng)늙C(j��)�M(j��n)�ІΪ�(d��)���ƣ����������С܇(ch��)�IJٿv�Ժͷ�(w��n)���ԡ�
�������ѽ�(j��ng)�O(sh��)Ӌ(j��)��ɵğo(w��)�����SС܇(ch��)��܇(ch��)���A(ch��)���о���Ӳ��ن�(w��n)�}���O(sh��)Ӌ(j��)��늙C(j��)�(q��)��(d��ng)����Ӳ��ٿ����������û���DSP���Ƶ�݆ʽ�(q��)��(d��ng)����ϵ�y(t��ng)������(j��)܇(ch��)�d���������ɼ�����Ϣ���ɿ���CPU�����Д࣬�քe��(du��)����݆ݞ늄�(d��ng)�C(j��)�M(j��n)�в��ٿ��ƣ�����ϵ�y(t��ng)����֧�C(j��)��(g��u)ͨ�^(gu��)CAN�����M(j��n)��ͨ�š�
1��Ӳ���ģ�ͷ���
�o(w��)�����SС܇(ch��)ʹ�Ãɂ�(g��)��݆�����(q��)��(d��ng)ϵ�y(t��ng)�Ą�(d��ng)��Դ��ǰ݆����Ʒ�����S��(d��ng)݆����܇(ch��)��D1��ʾ��
1.1�D(zhu��n)��ԭ��
��Ӳ����D(zhu��n)��ϵ�y(t��ng)ȡ���˙C(j��)е�������͜p���b�ã�ͨ�^(gu��)��Ӿ�·�{(di��o)��늙C(j��)�D(zhu��n)�٣��Ķ���׃܇(ch��)݆�D(zhu��n)�ٌ�(sh��)�F(xi��n)�����D(zhu��n)����Ҫ�D(zhu��n)��r(sh��)���D(zhu��n)��ă�(n��i)��(c��)܇(ch��)݆�D(zhu��n)��С�����(c��)܇(ch��)݆�D(zhu��n)�٣���ͬ�r(sh��)�g��(n��i)����(n��i)��(c��)܇(ch��)݆��^(gu��)�ľ��x�����(c��)܇(ch��)݆��^(gu��)�ľ��xС��܇(ch��)�w��Ȼ���(n��i)��(c��)ƫ�D(zhu��n)���Ķ���(sh��)�F(xi��n)�D(zhu��n)��
С܇(ch��)�D(zhu��n)���^(gu��)�����£����������Ղ�������ģ�M��ݔ��(�D(zhu��n)��ָ��)��Ӌ(j��)���D(zhu��n)��r(sh��)����(y��ng)�ăɂ�(g��)܇(ch��)݆���D(zhu��n)�٣����(n��i)���(c��)܇(ch��)݆�a(ch��n)���ٶȲ��(sh��)�F(xi��n)�D(zhu��n)��
1��2�D(zhu��n)��ģ��
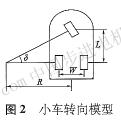
����Acke an��Jeantģ��[3]����С܇(ch��)���D(zhu��n)��ģ����D2��ʾ�����У�E��܇(ch��)���L(zh��ng)��
W��܇(ch��)�팒��R��С܇(ch��)�D(zhu��n)��돽���Ğ��D(zhu��n)��Ƕȡ�
�����о�С܇(ch��)�D(zhu��n)��r(sh��)��܇(ch��)�١��D(zhu��n)����cÿһ��(g��)܇(ch��)݆�ٶ�֮�g���P(gu��n)ϵ���҂������¼��O(sh��)���Ժ��Ե��桢݆̥������،�(du��)܇(ch��)݆�ٶȵ�Ӱ푣�
(1)܇(ch��)�w���ԣ�
(2)܇(ch��)݆���L��(d��ng)���������]�l(f��)�����ơ����D(zhu��n)��݆̥�x�_(k��i)������\(y��n)�Р�B(t��i)��
(3)݆̥��(c��)��׃���c��(c��)���������ȣ��������]݆̥���|(zh��)�c�Y(ji��)��(g��u)�ķǾ����Լ���ֱ�d�ɲ�ͬ��ɵ�݆̥��(c��)����ϵ��(sh��)��׃����
���������O(sh��)�l���£���(d��ng)С܇(ch��)�谴�Ľ��M(j��n)���D(zhu��n)��r(sh��)����V�鮔(d��ng)ǰС܇(ch��)�\(y��n)�D(zhu��n)�ٶȣ�Rin���(n��i)݆�D(zhu��n)��돽��Rout����݆�D(zhu��n)��돽������(j��)С܇(ch��)�D(zhu��n)��ģ���У�
2 ��Ӳ��ٌ�(sh��)�F(xi��n)��ʽ
|