һ�N������ģ��pi����������
��ƽ1����С��1�����1��2
��1�����ϴ�W�C늹��̌WԺ�������Lɳ410083��2��۳��д�W���칤�̼����̹���ϵ����ۣ�
ժ Ҫ��ᘌ�ģ��pid������ȱ��ϵ�y�����������Ć��}�������һ�N�����Ļ�������ԣ�Ⱥ���λԣ�ȵ�ģ��pi�������ą��������������������ƌ���ģ��pi�������Ľ���ģ�ͣ�ԓ����ģ�Ͱ������Կ������ͷǾ����a��������2�����֡����������r�����Ǿ����a�������������^�̵Ĕ_�ӣ��ɾ��Կ������ͱ��،����һ�A���r��ģ�ͣ�����ϵ�y������ԣ�Ⱥ���λԣ�ȣ�����ģ��pi�������ą���������Y�����������ڕr׃���Aϵ�y���͂��y��pi��������ȣ�ģ��pi���������������ԏ������{С���{���r�g�̵ȃ��c��
�P�I�~��ģ��pi��������������ԣ�ȣ���λԣ��
�ЈD���̖��tp 273 �īI���R�a��a
1����
���ڸ��A���r׃���Ǿ��Եȹ��I�^�̣����y��pid����ͨ���_��������Ŀ���Ч�������������ԏ���ģ��pid�������ڹ��I��õ���Խ��Խ�V���đ���[1-3]������ȱ��ϵ�y�ą�������������ģ��pid����Ȼ������ʹ�ã������������Mһ���ƏV�c���á�ģ��pid������������һ������{���������Ӻ�Ҏ�t�셢��������Y�ϵķ�������ģ��pid�������ǷǾ��Կ���������׃Ҏ�t�셢������Ǿ��Լӏ��������������y����ģ��pid�����������H�{���������ӣ������ڷǾ��Ե�Ӱ푣��������f�����y������ģ��pid���������������ö��Եķ����������Եķ��������㹤�I�đ��á�
���ڹ��I��ͨ������pi���Ƶ������������һ�N�����Ļ����������λԣ�ȵ�ģ��pi���������������������ƌ���ģ��pi�Ľ���ģ�ͣ�Ȼ��������،����һ�A���r��ģ�ͣ������������λԣ�ȵķ���������ģ��pi�������ą���������Y������ģ��pi���ƾ��������ԏ������{С���{���r�g�̵ȃ��c��
2���}����
1)���،���ģ�ͱ��R�ڌ��H���I�^�̿����У�������һ�A�r��ģ�́������������،���[8]��
ʽ�У�kt�鱻�،���ķ��B���棻t��r�g������l���ӕr�r�g��
�@Щ���������A�S푑����l��푑����^��������ȷ����@�ã����w������Ҋ�īI[8]�������ļ��O�ѽ�������ԓģ�͡�
2)���ypi���������������ypi��������
ʽ�У�e��Ŀ��ֵ�cݔ��ֵ��ƫ��ֵ��kp�����ϵ����t1��e�֕r�g������
�����������λԣ�ȷ������ypi�������ą��������������£�
ʽ�У�gc��jw����gp��jw���քe��ʾ�������ͱ��،���am�ͦ�m���քe��ʾϵ�y������ԣ�Ⱥ���λԣ�ȣ���g�ͦ�m�քe��am�ͦ�m�������Ĵ�Խ�l�ʡ�
���ڱ��،����һ�A���r��ģ�ͣ��Y��ʽ(3)��ʽ(4)���Եõ����ypi�������ą�����
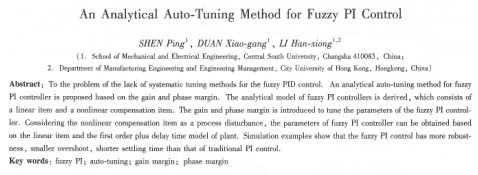
3)ģ��pi������ģ��pid�������ĽY������D1��ʾ��
�䔵�Wģ�͞�
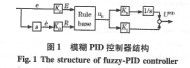
����=o�r��k1=0����������ģ��pi����������Y����D2��ʾ��
����ʽ(7)�еĦÞ�Ǿ��ԅ������������^���y���҅���ke��kd��k0�����Ӱ푿������ܵ���Ȼ���^ģ����ʹ�ÿ������ą��������dz����y��
|