���ܼ��ȵ�cmac�����c��������
������2������1���wչ1�����t113���Xʡ��2
1���Ϻ�������W�������W�c�������о������Ϻ�200093��2�Ϻ�������W����WԺ���Ϻ�200093;3�Ϻ���ͨ��W�Cе�c�����WԺ���Ϻ�200240)
ժ Ҫ��ᘌ����ܼ���ϵ�yģ�͵ķǾ����c�����IJ��_���Ե�ϵ�y���ԣ������һ�N����С�Xģ���W�j������( cmac)�ļ��Ȍ��r���ܿ��Ʒ�����ԓ�������ȸ���һ�N���Ƶļ�֫ϥ�P�����m���Y�������������ܼ��Ȕ[���������W���Wģ�ͣ����������ܼ���ϥ�P�����������ƅ����c�[���\�Ӆ���֮�g��ֱ������Pϵ���Դ˄����Wģ�͞���ƌ����OӋ��һ�N����pd-cmac�ļ���ϵ�y���ܿ����������M���ˌ������档����Y������������ϥ�P�����Ժܿ죨�s��0.5 s�r�g�ȣ���ۙ��Ŀ���������������õČ��r���c���ȣ����⣬���P��������y�_��λ���c�����ļ���ϥ�P���Ľ��ٶ�׃���������@��ؓ���P�ԣ�����ͨ�^��������������y�_��λ�õ��{�����_�����ȸ�ۙ�����Ȕ[�Ӳ��B��Ŀ�ġ�
�P�I�~�����ܼ��ȣ������Wģ�ͣ�С�Xģ�Ϳ�����
�ЈD���̖��tp 273 �īI���R�a��a
1����
�о�һ�N���Խ���ģ�M�����������Wϵ�y�е��P�I����һϥ�P�������m�����Ե����ܼ���ϵ�y�������֫�İ�ȫ���c���m�ԡ����ƽ�֫���ߵ������|��������Ҫ���x���ڼ��ȵ����ܿ��Ʒ��棬�����⌦���ܿ��Ƶļ�֫����߀����Ҋ����Փ�о�����������һ��ģ�����ơ���ͨbp�W�j���ơ����ҿ��Ƶ����ܿ��Ʒ����������s�ďͺ����ܿ��Ʒ���߀����δ���H���á�
iplϵ�yģ�͵ķǾ��ԡ��h����·�r���c��ͬ��֫�����߅����IJ��_���Ե��������_���ˑ�ԓ�Ѽ�֫ϵ�y����һ�����sϵ�y���о����䲻����Ҫ����Փ���M�Џ��s�Ǿ��Խ�ģ��������Ҫ�������Ч�����ܼ��g�M��ϵ�y���ơ����Č��о�һ�N���Cipl���B�r�����Q�Ե���������Wģ�͵�pd-cmac���m�����Ʒ�����
2 ipl��pd-cmac�������OӋ
1) pd-cmac�������OӋ С�Xģ�Ϳ�������һ�N���m�����ƾW�j����W���Ք��ٶȿ죬�����^�ߣ��ڌ��r�����r�dz����á����OӋ����cmac����е���ð�ȫ�ȷ���Ľ̌W�c���й�����
�����c���£�
��С�Xģ���W�j�����������Fǰ�����ƣ����F���،������ӑBģ�͡��ڳ�Ҏ���������F�������ƣ����Cϵ�y�ķ����ԣ������Ɣ_�ӡ�
2) pd-cmac�ČW���㷨�ČW���㷨[6]��
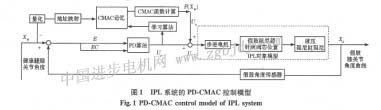
���ڸ��S������Ŀ����̖���Ƶ�iplϵ�y���@���OӋ�˻���pd���������W�j(cmac)�O������ģ�ͣ���Dl��ʾ��
����cmac����ӳ��ķ����飺ݔ����g5�څ^�g[s��s��]�Ϸֳ�(n+2c)�������g��������
ȡָ����̖r(k)����cmac��ݔ�롣ÿһ����ͬ�ڽY���r��cmacݔ��u�c������ݔ��u(k)����^���������أ��M��W���^�̡��W����Ŀ����ʹ������ݔ���ccmac��ݔ��֮����С����ʹϵ�y�Ŀ�����ݔ����Ҫ��cmac�������a����
cmac���{��ָ�˞�
��ϵ�y�_ʼ�\�Еr��ϵ�y�ɳ�Ҏ�������M�п��ơ�ͨ�^cmac�ČW����ʹpid�a����ݔ����������u���㣬cmac�a����ݔ����������u�ƽ���������ݔ��.
3���ȿ��Ƅ����W��ģ
�����о��������Ʒ�����Ч������Ҫ����ipl������ƌ���Ĕ��Wģ�͡����y�Ϟ��ˌ��Fϥ�P�������W�����M��������⣬�ԫ@�����P����ϥ�P�������P�������ء�Ȼ��������Ӌ������P�����������H�ϟo�����ڌ��H�ļ��ȿ�����Ҫ����ˣ������Զ����w�����\��ϵ�y����A����D2��ʾ��
|