��C��OS-II�ڟoˢֱ��늄әC�����еđ���
�� Դ������
(�ؑc��W���ؑc400030)
ժҪ���OӋ�˻���Ƕ��ʽ���r����ϵ�yIxC��OS II�ğoˢֱ��늄әC�D������p�]�h����ϵ�y����B�˻��چ�Ƭ�CdsPIC30F6010A�Ŀ���ϵ�yӲ���Y����Ԕ���f���˦�C��OS II�΄յķ�����OӋ���̣�OS��II�����ˑ���ϵ�yܛ�����OӋ�����x�ԏ������ھS�o�͔Uչ���ܡ�
�P�I�~����C��OS-II��dsPIC30F6010A���oˢֱ��늄әC���D������p�]�h����ϵ�y
�ЈD���̖��TM33 �īI���R�a��A ���¾�̖��1004��7018(2010)05��0031��03
0����
�oˢֱ��늄әC��һ�N���ڿ����ռ���늙C��͡��������ˢ��Q����ʹ����ӓQ���c��ˢֱ��늄әC�Б�늄әC��ȣ������S�����c������õ��D���D�����ԡ����لӑB푑�����Ч�ʡ��L�������\�DԪ�����^�ߵ��D�ٷ����ȣ��V�������ڼ����������܇�����պ��졢���MƷ���t�������I�Ԅӻ��O��̓x�����ИI��
��C��OS II��һ��Դ�a���_������ֲ���ɹ̻����ɲü�����ռʽ��Ƕ��ʽ���r����ϵ�y����C��OS��II�ܹ���64���΄գ����ṩ�΄��{���c�������ȴ�������΄��gͬ���cͨ�š��r�g�������Д���յȹ��ܣ����Ј���Ч�ʸߡ�ռ�ÿ��gС�����rl���܃����ͿɔUչ�ԏ������c�����Ļ���Ƕ��ʽ���r����ϵ�y��C��OS��II�͆�Ƭ�CdsPIC30F6010A�OӋ��һ���oˢ늄әC����ϵ�y���c���y��ǰ���_����ͬ�����ڦ�C��OS��II����ϵ�y�ij����OӋ����һ����đ��ó���ֽ�ɶ����΄Ձ���ɣ��ܴܺ�̶ȵؽ��Ϳ���ϵ�y�_�l�y�ȣ��s��ܛ���_�l���ڡ�
1�oˢֱ��늄әC����ԭ��
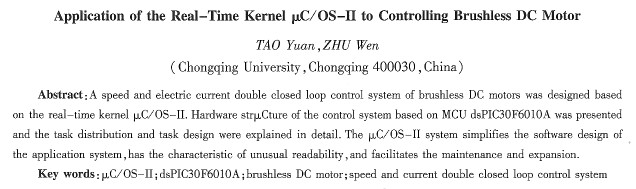
�oˢ늄әC�ēQ����ͨ�^��ӷ�ʽ���Ƶġ��D�ӵ�λ���ɶ�����Ƕ��Ļ����������z�y��ÿ���D�ӴŘO���^���������������������͕��l��һ�����ƽ����ƽ��̖����ʾ�D�ӵı��ŘO���ϴŘO�����^ԓ����������������������������̖�ĽM�ϣ����ܴ_���Q��ľ��_��o�����@�Mͨ늣����F�oˢ늄әC�����D������120��늽Ƕȟoˢֱ늄әC�Q������D�@�Mͨ���r��D1ʾ���D��ÿ�D�^60��늽Ƕȣ�����һ����������͕���׃��B�����һ���������Ҫ�Q�����Ρ������һ���Cе�D�ӣ�Ҫ�؏͵�����ڔ�ȡ�Q���D�ӴŘO������
2�oˢ늄әC����ϵ�y�OӋ
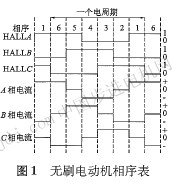
�oˢ늄әC�D������p�]�h����ϵ�y��D��D2��ʾ����h���D�٭h���ȭh������h���D�٭h��PID�\�������h�ṩ����o��������h�ٽ�PID�\�㣬����PWMռ�ձ�ݔ�����{��늙C���D����o���ٶ�׃��������h�Ĉ����l��Ҫ���D�٭h�ߡ�
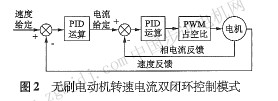
��Ӳ��ϵ�y��Ҫ����������M0sFET������׃���·���������·���z�y�·�ͱ��o�·���ɣ��D3��oˢ늄әC����ϵ�yӲ����D��dsPIc30F610A��һ��T��Ƕ��ʽ늙C���Ƒ����OӋ��Mcu������ݔ���ƽ׃��֪ͨ���_��늙C���ƌ���PwMģ�K��PwM�������_FLTA����ͬ�r�ɘ����4·��ADc�����ڵ����O��cNl3��cNl4��cNl5��ݔ���ƽ׃��֪ͨ(cN)���_����������������̖���ƽ�l��׃���r���a���ƽ׃��֪ͨ�Д࣬���oˢ늄әC������������̖��PwMlH��PwM3L�Ɍ��F6��������3�����aPwMݔ������M0sFET������׃���·�������@�M��ʩ�ӵ�늉�����׃늙C���D�١��oˢ늄әC������Q���r�̣�ֻ�Ѓ����@�Mͨ늣���ֻ��Ҫһ·����ɘ��·�����@�N����ɘӞ�ĸ������ɘӣ���Ҫ��PwM���ƽ�����c�ɘ����ֵ�����ܵõ��^�ʴ_�������ֵ���@�M��������ɘ���裬�a����늉������\�ŷŴ�һ·ݔ�뵽ADcģ�K��ݔ��ͨ��AN3���M��늙C������ɘӣ�һ·�c�O��****����M�б��^���B�ӵ�PwM�������_F��A�����F늙C���^�����o��
�����ṩ�ٶȽo������һ���λ���B�ӵ�ADc��һ��ݔ��ͨ��AN2���ɂ��_�P�Á�����늙C����ͣ�������D�������Á����Ƕ��ʽ���r����ϵ�y���΄��\�Р�B��늙C�ٶ���Ϣ�o��λ�C�@ʾ��
3���ڦ�C��0s��II��ܛ���OӋ
3��1��C��os��II��dsPIc30Fʯ010A�ϵ���ֲ
�ڦ�c��0s��II��ֲ�^���У��c���ó������P���ļ���os��cFG H��INcLuDEs��H���c̎�������P���ļ���Os_CPU H��0s_CPU��c.c��os_cPll-A��AsM��
|