��T���w݆���������ؿ����P(gu��n)�I���g(sh��)�о�
������1������1���၆÷1�����F��2�����L(zh��ng)��1
(1���ں���Ƽ���(chu��ng)���о�Ժ���V�|����518057��2�����I���I(y��)��W(xu��)�������������I150001)
ժҪ��ᘌ�(du��)��T���������w݆ϵ�y(t��ng)�е��P(gu��n)�I���g(sh��)�M(j��n)�����о��������һ���ڔ�(sh��)��IP��(n��i)�˼��ɵ�Ӳ����(sh��)�F(xi��n)���������Խ�Q�w݆�������ձ���ڵ�һЩ��(w��n)�}���O(sh��)Ӌ(j��)rһ�N������O��100��ռ�ձȷ��Ã�(n��i)�\(y��n)�еĆΘO��PwM�ز����Ƽ��g(sh��)��������������·��?f��)�Y(ji��)��(g��u)��������(y��ng)�ĖŘO�(q��)��(d��ng)���������_(k��i)�l(f��)�˿��Բɘ������@�M����ĴŸБ�(y��ng)ʽ����������������˱�����µĮa(ch��n)���C(j��)�������Դ˞���A(ch��)�O(sh��)Ӌ(j��)���Ԅ�(d��ng)�����·���o���ˌ�(sh��)�F(xi��n)�w݆�����ŷ������㷨��ϵ�y(t��ng)��(j��)AsIc�Y(ji��)��(g��u)����(sh��)�(y��n)�Y(ji��)��������ԓ�w݆ϵ�y(t��ng)������(g��)�����ޅ^(q��)���(n��i)���������õĄ�(d��ng)�B(t��i)���o�B(t��i)���ؿ������ܡ�
�P(gu��n)�I�~���w݆�����������ؿ��ƣ��ΘO���}���{(di��o)�ƣ�����늉�
�ЈD���̖(h��o)��TM33 �īI(xi��n)��(bi��o)�R(sh��)�a��A ���¾�̖(h��o)��1004��7018(2010)05��0037��05
0�� ��
�ں����w�����ˑB(t��i)����ϵ�y(t��ng)�У��������w݆����������ĵ�Ԫ����֮һ���������w݆����һ���ķ�ʽ���b���l(w��i)�ǻ������������d�w�đT���S�ϣ�ͨ�^(gu��)��(du��)�w݆�D(zhu��n)���M(j��n)�м��ٻ��Ƅ�(d��ng)���Ɓ�(l��i)��׃�w݆�DŽ�(d��ng)��(����(d��ng)����)�Ĵ�С���߷��Ķ����d�w�Ϯa(ch��n)�����������أ��_(d��)���ˑB(t��i)���Ƶ�Ŀ��[1]�������w݆�D(zhu��n)��(d��ng)�T���ܴ��ڼ����^(gu��)���Е�(hu��)�a(ch��n)�������Ą�(d��ng)�ܣ���ˮ�(d��ng)ϵ�y(t��ng)�ГQ���Ƅ�(d��ng)��B(t��i)�r(sh��)����ξ��_��ƽ��(w��n)�ؿ�����ݔ�����ز����C����(g��)ϵ�y(t��ng)�Ŀɿ��\(y��n)����һ��(g��)���^�P(gu��n)�I�Ć�(w��n)�}��
�F(xi��n)���������w݆ϵ�y(t��ng)��Ҫ���傀(g��)���ֽM�ɣ������w�������w݆���o(w��)ˢֱ��늄�(d��ng)�C(j��)���S�нM���Ϳ����·������늄�(d��ng)�C(j��)�Ķ��Ӳ��ßo(w��)�۟o(w��)�F�ĽY(ji��)��(g��u)��늙C(j��)�D(zhu��n)�Ӻ��w݆��һ�w���w݆�����ŷ�ϵ�y(t��ng)���ԟo(w��)ˢֱ��늄�(d��ng)�C(j��)����ƌ�(du��)��ģ��䌍(sh��)�|(zh��)����һ��(g��)����]�h(hu��n)����ϵ�y(t��ng)�������������ɘӵĺÉĕ�(hu��)ֱ��Ӱ푵�ϵ�y(t��ng)�����w���ܡ����⣬�o(w��)ˢֱ��늄�(d��ng)�C(j��)�Ŀ��Ʋ����Ǻ�����׃��·�ľ��w�Y(ji��)��(g��u)�ֲ��_(k��i)�ģ���ͬ����׃���Y(ji��)��(g��u)������Ʋ���Ҳ���M��ͬ��ͬ�r(sh��)������z�y(c��)������늉����ƴ�ʩ����늕�(hu��)���������ˣ�����x��������·�Y(ji��)��(g��u)�ɞ��O(sh��)Ӌ(j��)�w݆�����ŷ�ϵ�y(t��ng)�����R����Ҫ�΄�(w��)��
����ᘌ�(du��)�������(xi��ng)�P(gu��n)�I���g(sh��)�����һ�N����IP(֪�R(sh��)�a(ch��n)��(qu��n))��(n��i)�˔�(sh��)�ּ��ɼ��g(sh��)��Ӳ���O(sh��)Ӌ(j��)��������Q�˂��y(t��ng)�w݆�����д��ڵ�һЩ��(w��n)�}��������ͻ׃�ȣ��ڼ��ٻ�p���^(gu��)���о��ܫ@���^�ߵ����ؿ������ܣ����ҿ��������(d��ng)�������\(y��n)�С�
1�����(q��)��(d��ng)��·�����c�O(sh��)Ӌ(j��)
�����o(w��)ˢֱ��늄�(d��ng)�C(j��)���(q��)��(d��ng)���Ƽ��g(sh��)������N��ͣ�Ŀǰ��(gu��)��(n��i)�⑪(y��ng)���^�����PAM�{(di��o)�ơ�PWM�{(di��o)�ƻ�PAM��PwM����{(di��o)�����N����������PAM�{(di��o)����ָ�Hͨ�^(gu��)�{(di��o)��(ji��)ֱ��ĸ��늉���(l��i)�_(d��)������늙C(j��)�@�M�����Ŀ�ģ���(sh��)�|(zh��)����һ�NBucK�·��PAM��PwM����{(di��o)�Ƽ��g(sh��)�t�nj�(du��)PAM��һ�N���M(j��n)���a(b��)�䣬��(d��ng)늙C(j��)̎�ڼ����^(gu��)�̕r(sh��)�HPAM�����ã���(d��ng)��Ҫ�Ƅ�(d��ng)(��p��)�r(sh��)���M(j��n)��PAM�{(di��o)��ͬ�r(sh��)���M(j��n)��PwM�{(di��o)�ƣ�������Ƅ�(d��ng)�^(gu��)���е���������[2]�������M(j��n)�����������ؿ��ƣ�PAM���g(sh��)һ����Ҫʹ������ȫ��Y(ji��)��(g��u)�M(j��n)�ГQ���(q��)��(d��ng)���䃞(y��u)�c(di��n)������y��С������ͨ�^(gu��)��ֱ��ĸ���ϼӲɘ����ķ����������z�y(c��)����ԓ�·�������^��(f��)�s������������Ǿ������أ������˿���ϵ�y(t��ng)�ķ�(w��n)��ԣ�ȣ�Ҫ��@�ýӽ������(d��ng)���ķ�(w��n)���\(y��n)�Р�B(t��i)�DZ��^���y�ģ������Ǯ�(d��ng)늙C(j��)�D(zhu��n)�ٷ����^(gu��)��˲�g��(hu��)�a(ch��n)�����^���������׃��������ֱ��ĸ�����g�әz�y(c��)�@�M���߀��(hu��)�ܵ����ɿ�(n��i)�h(hu��n)����Ӱ�[3]��ͬ�ӕ�(hu��)�������ز���(d��ng)��ʹ�ÿ�������׃�ġ�PwM��һ�N�����{(di��o)�Ƽ��g(sh��)���·�Y(ji��)��(g��u)����(du��)��(ji��n)�Σ�����(du��)��С늸�늙C(j��)��(l��i)�f(shu��)�������\(y��n)�Еr(sh��)���@�M����y�����^������˕r(sh��)���õ��džΘO���{(di��o)��ģʽ���t���߀��(hu��)���F(xi��n)���m(x��)�F(xi��n)������o(w��)����ֱ��ĸ�����M(j��n)������ɘӡ�����֮�⣬���˱��C�l(w��i)�ǵȺ��������L(zh��ng)�ɿ��������w݆�o(w��)ˢֱ��늄�(d��ng)�C(j��)�Ĺ�������·һ��ʹ�ð��Y(ji��)��(g��u)�������ǹ��I(y��)�ϑ�(y��ng)�ñ��^�ձ��H���ȫ��Y(ji��)��(g��u)������l(f��)����·�F(xi��n)���@�N���Y(ji��)��(g��u)�Ĺ��ʻ�·ֻ��ͨ�^(gu��)�����@�M��������Ҫ�@���������D(zhu��n)�������Ʊݣ�����ړQ��߉���O(sh��)Ӌ(j��)�����·��
��ˣ����˽�Q���ϴ��ڵĸ��N��(w��n)�}���F(xi��n)���һ�N�µ�����늙C(j��)�(q��)��(d��ng)���Ʒ�������Dl��ʾ��ԓ��
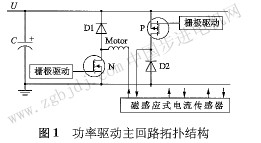
����һ��(g��)�ΘO�Եľ���PwMϵ�y(t��ng)������(hu��)����Ǿ������أ�ͬ�r(sh��)ֱ�ӏ��@�M�вɘ�����������˃�(n��i)�h(hu��n)���ĸɔ_��߀���Ԍ�(sh��)�F(xi��n)100��늉�ռ�ձ��\(y��n)�С��D1�H����������ijһ����·�Y(ji��) |