һ�N�����xɢ��λ�˵�����܇�\��Ҏ(gu��)������
���Q�A��ԬҲ
���������I(y��)��W�����Ϣ�c���ƹ��̌WԺ������100124��
ժ Ҫ��ᘌ��ϵK�h(hu��n)���¾��з������s������܇���\��Ҏ(gu��)�����}�������һ�N�����xɢ��λ�˵�����܇�\��Ҏ(gu��)��������ԓ�������Ȍ�����܇���\��܉�E���ڶ��ʽ������ͨ�^�����ʽ��������(sh��)���ɟo�ϵK�l�����B������λ�ˠ�B(t��i)���\��܉�E��ͬ�r��ԓ����������܇�\��Ҏ(gu��)�����}�е�λ�ˠ�B(t��i)���g�M���xɢ�����γ��xɢ����ס�ˠ�B(t��i)���g������(j��)�xɢ��λ�ˠ�B(t��i)���g�����c�����x���ėl���������B�������xɢλ�˵�����܇�������\��܉�E�������ԓ�����Y(ji��)�ϻ����\��܉�E�������Æ��l(f��)ʽ�����㷨��K��Q�ϵK�l���µ��\��Ҏ(gu��)�����}�����ڄ����W����ƽ�_�еČ��Y(ji��)����C��ԓ���������_�Ժ���Ч�ԡ�
�P(gu��n)�I�~������܇���\��Ҏ(gu��)��������(sh��)��܉�E���xɢλ�˿��g
�ЈD���̖��tp 273 �īI���R�a��a
1���� ��
����܇�\��Ҏ(gu��)��ϵ�y(t��ng)������܇�����c����ϵ�y(t��ng)����Ҫ�M�ɲ��֡�����ҪĿ����������h(hu��n)��������܇����ʼλ���Ƅ���Ŀ��λ�˵������\���^���M��Ҏ(gu��)����ʹ����܇����ȫ��Ч���\�ӷ�ʽ�Ƅ���Ŀ��λ��
����܇����݆ʽ�ƄәC����ϵ�y(t��ng)��һ�N����Ҫ���\��Ҏ(gu��)�����������˹��݈�����ppp�������������ɘ䷽���ȡ��@Щ�����������\��Ҏ(gu��)�����}�������ԣ�ʹ���ڌ��Hϵ�y(t��ng)�������������y��jpl���ƵĻ���܇�����õ�morphin�����t�ǽ�����^��ɹ�������܇�\��Ҏ(gu��)����ʽ��ԓ��������(j��)�܇��h(hu��n)�������ȴ_����һ�M�\��܉�E�M���u�r���x��(zh��)��****���\��܉�E��morphin�f���ڌ��H��(y��ng)����ȡ���˺ܺõ�Ч��������܇�dӋ���������Cеϵ�y(t��ng)���ȵ����ƣ����]����ȫ�����û���܇�ęC��������
����(j��)����܇�\��Ҏ(gu��)�����}�����c�����������һ�N����܉�E����(sh��)��⼰λ�˿��g�xɢ��������܇�\��Ҏ(gu��)��������
2����܇λ�˿��g
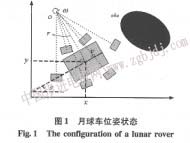
������܇�\��Ҏ(gu��)�����}��λ��( configuration)��ͨ�^��z��y���ȣ�k���M����������D1��ʾ��
(x��y)������܇��ȫ������ϵ�µ�λ�����ˣ��՞�܇�w���Ƅӷ���k��܇�w�����\��܉�E�����ʡ����У�����^������܇���(q��)�ӷ�ʽ��������݆�ķ���ǹ�ͬ�Q�������(q��)�ӷ�ʽ�̶�����r�£��c���(q��)��݆������g����һһ����(y��ng)���P(gu��n)ϵ�����J���nj�����܇����݆�ˑB(t��i)��������������܇�Ĺ����^(q��)���д���������܇���ɴ�Խ���ϵK�^(q��)���ϵK�^(q��)��ľ��w������ʽ������܇�Ă�����ϵ�y(t��ng)�Q����
����܇�\��Ҏ(gu��)��Ŀ�˞飬�ڝM��܇�w�\�Ӽs�������_�ϵK��ͬ�r��ʹ����܇��ȫ�Ҹ�Ч������ʼλ���Ƅ���Ŀ��λ�ˡ������\���^�̿�ͨ�^�\��܉�E����ʽ�M��������
ʽ(1)������܇�Ļ����\�ӌW�s�����̣����У�v(t)��܇�wƽ�Ӿ��ٶȣ�w(t)���D(zhu��n)�ӽ��ٶȡ������\�ӌW�s������͵ķ������s�������F(xi��n)��܇�w���ɂ�(c��)�ơ�һ����r�£�����܇�ڝM������\�ӌW�s����ͬ�r߀�ܵ���С�D(zhu��n)���돽�ļs������С�D(zhu��n)���돽r����ͨ��������܇���(q��)�ӷ�ʽ��������݆�Ĕ[�Ƿ��қQ����
3���څ���(sh��)����܉�E����
���ȿ��]�o�ϵK�l�����\��܉�E�����ɡ�܇�w�Ļ����\�ӌW���̿��M������׃�Q����s���ʾ܉�E���L�ą���(sh��)��ͨ�^ʽ(2)�Ɍ�ʽ(1)�D(zhu��n)����ʽ(3)����ʽ�����У�k(s) =co(s)/v(s)��ʾ�\��܉�E�������Ss׃���ĺ���(sh��)��ʽ(3)��܇�w�\�ӷ����c�r�g헷��x����ͨ�^����(sh��)k(s)���Kֹ���Ls������܇�w��܉�E�Ƅӵ��ٶ�v(s)��������������\��܉�E�����У�a(s)��s���Q�����\��܉�E��x-y�������g�е�ͶӰ��v(s)�t�Q��������܇��ͶӰ�\�ӵľ��w��ʽ�������������
���ڴ_��v(s)�迼�]܇�w�ڌ��H�Ƅ��^�����(q��)�ӿ���ϵ�y(t��ng)��B(t��i)�����m�ڌ��r�����(q��)�ӿ���ϵ�y(t��ng)�Q��������������мٶ�v(s)�鳣ֵ����ӑՓ�����c����k(s)��s�����xȡ��
|