�o�S�Ю���늙C(j��)����λ�õĄ�(d��ng)�B(t��i)�������
�O�Ԗ|1��������1������1������2
��1���K��W(xu��)늚���Ϣ�����̌W(xu��)Ժ�����K�(zh��n)��212013��2�|�ϴ�W(xu��)늚�̌W(xu��)Ժ�����K�Ͼ�210098��
ժ Ҫ��ᘌ�(du��)�o�S�Ю���늙C(j��)�D(zhu��n)�ӏ�������ɶȑҸ�ϵ�y(t��ng)��������r��������(j��ng)�W(w��ng)�j(lu��)��ϵ�y(t��ng)�����M(j��n)���˄�(d��ng)�B(t��i)��������о����ڽ�B�o�S�Ю���늙C(j��)����ԭ���Ļ��A(ch��)�ϣ������˟o�S�Ю���늙C(j��)����Ҹ����Ĕ�(sh��)�W(xu��)ģ�ͣ���(du��)ԓģ���M(j��n)�п����Է������C��ԓϵ�y(t��ng)���棬��(y��ng)����(j��ng)�W(w��ng)�j(lu��)��ϵ�y(t��ng)������ԭ����׃������(qi��ng)��ϵķǾ���ϵ�y(t��ng)����(d��ng)�B(t��i)�����2��(g��)λ�ñ˴˟o��ϵľ�����ϵ�y(t��ng)������(du��)�����ľ�����ϵ�y(t��ng)�M(j��n)�����]�h(hu��n)�O(sh��)Ӌ(j��)���������matlab/simulink�����䌦(du��)ԓ����ϵ�y(t��ng)���˷����о�������ԇ�(y��n)�Y(ji��)���@ʾ����(j��ng)�W(w��ng)�j(lu��)��ϵ�y(t��ng)�����ɱ��C�o�S�Ю���늙C(j��)�ڏ�������ɶ��ό�(sh��)�F(xi��n)��(d��)�����ƣ����]�h(hu��n)ϵ�y(t��ng)�������õĄ�(d��ng)���o�B(t��i)���ܡ�
�P(gu��n)�I�~���o�S�Ю���늙C(j��)������λ�ã���(j��ng)�W(w��ng)�j(lu��)�棻�������
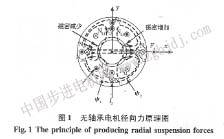
�ЈD���̖(h��o)��tp 27 �īI(xi��n)��(bi��o)�R(sh��)�a��a
1���� ��
���ô��S�к�늙C(j��)�Y(ji��)��(g��u)�������ԣ��Ѵ��S���еđҸ��@�M�B�@��늙C(j��)�����@�M�ϣ�ʹ�ɷN�ň�(ch��ng)�ϳ�һ�w������ͬ�r(sh��)��(d��)������늙C(j��)�D(zhu��n)�ӵđҸ������D(zhu��n)���o�S��늙C(j��)���ǻ����@һ�O(sh��)�������ģ��o�S��늙C(j��)�ķNܶ࣬�������͡��Б�(y��ng)�͡������͵ȣ����У��Y(ji��)��(g��u)��(ji��n)�Ρ��������š��ɿ��Ըߵğo�S�Ю���늙C(j��)�����ܵ��V������ҕ��
���ڟo�S��늙C(j��)�đҸ��Ƕ������D(zhu��n)���@�M�͑Ҹ��@�M����õĽY(ji��)����늙C(j��)�Ҹ�����늴��D(zhu��n)��֮�g���Ҹ���֮�g��������(f��)�s�ķǾ�������P(gu��n)ϵ�����Ҫ��(sh��)�F(xi��n)늙C(j��)�����ܷ�(w��n)���\(y��n)�в����^�ߵĿ������ܣ���회�(du��)늙C(j��)�M(j��n)�зǾ��Խ���īI(xi��n)[5]�����D(zhu��n)�Ӵň�(ch��ng)������Ʋ��Ԍ�(du��)�o�S�Ю���늙C(j��)�M(j��n)�ж���(w��n)���Ҹ������о�����ȡ���˲��e(cu��)��Ч���������@�N������һ�N��(w��n)�B(t��i)������ƣ����ˌ�(sh��)�F(xi��n)��(d��ng)�B(t��i)������IJ�����(j��ng)�W(w��ng)�j(lu��)��ϵ�y(t��ng)��������(du��)�o�S�Ю���늙C(j��)����λ��ϵ�y(t��ng)�M(j��n)�Є�(d��ng)�B(t��i)������ơ�
2�o�S�Ю���늙C(j��)����Ҹ����Ĕ�(sh��)�W(xu��)ģ��
�o�S�Ю���늙C(j��)�����Џ�(f��)�ϯB�@��ʬ����(du��)�O���D(zhu��n)���@�M��p����(du��)�O�ď������@�M�������@�M�ĘO��(du��)��(sh��)��(y��ng)�M�������P(gu��n)ϵ��p1=p2��1�����У�p1���D(zhu��n)���@�M�ĘO��(du��)��(sh��)��p2��Ҹ����@�M�ĘO��(du��)��(sh��)����p1=2�����@�Mnl1��nl2����(g��u)�ɣ��Á��a(ch��n)�����D(zhu��n)�ň�(ch��ng)��늴����أ�p2=1�����@�Mnu��nv��(g��u)�ɣ��Á��a(ch��n)������Ҹ��������D(zhu��n)���@�M�͑Ҹ������@�M�зքeͨ�����i1��i2���t�քe�a(ch��n)���ĘO��朦�1�̓ɘO��朦�2��x��y�������ഹֱ���D(zhu��n)��λ�ÿ�������(bi��o)�S����D1��ʾ��
�ڿ��d��r�£����D(zhu��n)����Ҫ��z������ď��������ڏ����������@�M��ͨ����Dl��ʾ�����l2���ĈDl�ɵã������ښ�϶�҂�(c��)��1�ͦ�2ͬ�t��϶�������ӣ��ښ�϶���(c��)��1�ͦ�2���t��϶���ܜp�٣��Ķ��a(ch��n)����x������ď�����fa���ڑҸ������@�M��ͨ�뷴��������ɮa(ch��n)����x������ď�������ͬ������y�S����ď���������ͨ�^�ڑҸ������@�M��ͨ���cl2��ֱ������@�á�
��������㣬ͨ�^c3/2��cr/s׃�Q�����oֹ����(bi��o)ϵ�µ�3���D(zhu��n)�Q�����D(zhu��n)����(bi��o)ϵ�µ�2���о����ڿ��d��r�£����D(zhu��n)����(bi��o)ϵ��2������(bi��o)���ֱ���D(zhu��n)���@�M�͏������@�M���ԵĻ��О�0���D(zhu��n)���@�M�Ը�l(w��i)1s�͏������@�M���Ը�l(w��i)2s�鳣ֵ�������g�Ļ���m12s�c�D(zhu��n)�ӵď���ƫ�Ƴɱ�������
ʽ�У�r��l�քe���D(zhu��n)�Ӱ돆���D(zhu��n)���S���L(zh��ng)�ȣ���0��՚�Ō�(d��o)�ʣ�g 0���϶�L(zh��ng)�ȣ�n1����n2�քe���D(zhu��n)���@�M�͑Ҹ����@�M�є�(sh��)��
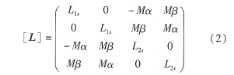
늙C(j��)��늸о��rl]�ɱ�ʾ���¡�
ʽ�Ц��ͦ·քe���D(zhu��n)����x��y�����ϵď���ƫ�ƣ�m���D(zhu��n)���@�M�͏������@�M�Ļ���ϵ��(sh��)����(bi��o)s��ʾ���ӂ�(c��)�ķ�����
����(j��)�����D(zhu��n)�Q�P(gu��n)ϵ���o�S��늙C(j��)��(ch��)��Ĵ��ܱ��_(d��)ʽ��
|