����������h(hu��n)��ܛ���wץȡ����
���W(xu��)�֣��ܿ������LӢ������
(�Ͼ��r(n��ng)�I(y��)��W(xu��)���W(xu��)Ժ�����K�Ͼ�210031)
ժ Ҫ����p�ٙCе��ץȡܛ���w��ɵēp������������P(gu��n)��(ji��)�����A(y��)�y��������h(hu��n)�ھ�ץȡ���Ʒ���һԓ����ͨ�^������ɫ�A(y��)�yģ��ֱ���A(y��)�y�P(gu��n)��(ji��)���ص�׃�������A(y��)�yܛ���w���ȵ�׃��������ͬ�r���ƙCе��ץȡ�^�����P(gu��n)��(ji��)����ƫ��ͽ��ٶ��P(gu��n)ϵһ�ڌ��H�P(gu��n)��(ji��)���غͻ�ɫ�A(y��)�y����֮�g���þ��Բ�ֵ�����ɘ����ڌ��A(y��)�y������u�ӵ����ػ�·��һ�����������(d��ng)ץȡ���Є���׃����ܛ���w�r�������P(gu��n)��(ji��)�����A(y��)�y��������h(hu��n)ܛ���wץȡ����ϵ�y(t��ng)���Cе�ֺ�ܛ���w֮�g�ĄӑB(t��i)���|�^�̾���һ�������m��(y��ng)�ԣ����Կ��ٸ�ۙ�O(sh��)��ֵ�����ҟo��ij��{(di��o)����ʎ���F(xi��n)��ʹ�������ܺ̈́ӑB(t��i)Ʒ�|(zh��)�õ��^����ƣ������^���������ԣ����m��ܛ���wץȡ��һ�N���Ʒ�����
�P(gu��n)�I�~��ץȡ�����ƣ���ɫ�����A(y��)�y���Cе�֣�ܛ���w
�Ї����̖��tp 24 �īI��(bi��o)�R�a��a
1����
ץȡ��һ�N��(f��)�s�Ļ����������漰�Cе�ֺͱ�ץ���w�g������á���ץȡܛ���w����ժˮ���r�������������ƣ�Ҳ��������혿��ƣ���������c������λ�Ï���ϣ���һ�N�O���(f��)�s�Ļ�Ͽ��ơ�����λ�Ã�(n��i)�h(hu��n)���@ʽ�����ƿ����ڲ��Ą�ԭ��λ��ϵ�y(t��ng)�Ļ��A(ch��)�ό��F(xi��n)�����ƣ����ЏV���đ�(y��ng)�á�
�C����ץȡδ֪���w�r��Ҫ�ھ��A(y��)�y���w�Ą���׃����Ŀ������ָ���ą����������ƄәCе��ָ����Ӌ��׃��λ��̎�����@�^���д_������****���Ք�푑�(y��ng)�ٶȵ��_���|λ��̎���ҟo��ʎ�ͳ��{(di��o)���F(xi��n)����ץȡܛ���w�r���Cе�������ж������|�c��ͬ���cץȡ����Kܛ���w���н������]�l�����_��ƽ�⡣�����ھ��A(y��)�y���w�Ķ������|�c���Ȳ������H����pС���w����׃����ץȡ��Ӱ��������������h(hu��n)�A(y��)�y��ܛ���wץȡ���Ʒ�����
2������h(hu��n)�A(y��)�y��ܛ���wץȡ����
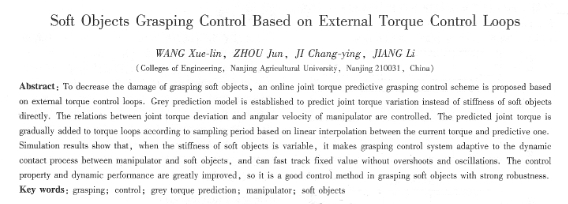
����Ļ�ɫ�P(gu��n)��(ji��)�����A(y��)�y��������h(hu��n)ܛ���wץȡ���ƿ�܈D����Dl��ʾ��
�����ⲿ���حh(hu��n)��Ŀ���ǜpС��ۙ�����λ���`����������ƾ��ȣ��pСλ��ϵ�@�S�C�ɔ_��ԓ���������ؿ��ƻ�·����λ�ÿ���������ӣ����ؿ�������ݔ��q����λ�ÿ�������ݔ�룬ĩ�ˈ�(zh��)���������������Կ���λ���ŷ�ϵ�y(t��ng)�ĸɔ_������λ�ÿ��������кܸߵ��ŷ����ȣ��c�Cе������������������^���ԣ���λ��ϵ�y(t��ng)��Ӱ푿��Ժ��Բ�Ӌ��λ���ŷ�ϵ�y(t��ng)�Ѕ���(sh��)��׃������λ�íh(hu��n)�o����ƣ������حh(hu��n)Ӱ푴��p�������حh(hu��n)��ǰ��ͨ������һ�A�e�֭h(hu��n)��(ji��)��ʹϵ�y(t��ng)����λ�A�Sݔ�����푑�(y��ng)�o��(w��n)�B(t��i)�`�
�ڈDl������h(hu��n)��·�У�����h(hu��n)�Ļ�ɫ��Ӌ�����r�A(y��)�y�P(gu��n)��(ji��)���ص�׃�����ڮ�(d��ng)ǰ���غ��A(y��)�y����֮�g���о��Բ�ֵ�����������{(di��o)����ʎ���F(xi��n)��ͬ�r�ƌ�(d��o)�Cе��ץȡ�^���еĽ��ٶȂ��f����(sh��)�����ٶȵ�׃��ͬ�ӕ�Ӱ�ץȡ���|(zh��)����
������Ҫ�о�ܛ���wץȡ�^���������ƣ����ęCе�ֽ��|����(w��n)��ץȡܛ���w���^�̿��ơ������ԃ�ָ��ץȡܛ���w������ϵ�y(t��ng)��B���ڻ�ɫ�P(gu��n)��(ji��)�����A(y��)�y��ܛ���wץȡ���ơ�
3�Cе�ֽ�ģ
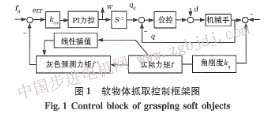
һ�N�ڹ��r(n��ng)�I(y��)���õęCе��ץȡ����ժʾ�D����D2��ʾ��
�D�У�2ָ���Ǿo����ᔣ���˹��{(di��o)���_�϶ȣ���ָ��ȫ���Q���b����һ�_늙Cͬ�r���ƃəCе���]����ָ��ģ���O(sh��)�B�U���|(zh��)������ֲ����|(zh��)�ľ��B�U���D(zhu��n)�����Ğ�l���B�U���L��2l���B�U�\�ӵ�ճ��Ħ��ϵ��(sh��)��s������Ħ��ϵ��(sh��)��ţ���(d��ng)�ĵ�ֵ���^С�r���J���B�U���|(zh��)���������ģ�����(j��)ţ�D���ɵõ����\�ӷ��̣�
ʽ��i= 4ml2/3���D(zhu��n)�ӑT����mg��Cе���������Ȟ��ֹ��{(di��o)���ĽǶȣ��J���P(gu��n)��(ji��)̎��늙C�ܝM�������Ҫ��ϵ�y(t��ng)��ֵ�����Ҳ�Ӌ����Ӱ푡�
��ʽ(1)���õ���ժ�Cе�ֵĂ��f����(sh��)��
|