�������S�h��ģ�͵Ć��lʽ·��Ҏ���㷨
ꐺ��x��ꐂ������S
�������I���I��W늚��ϵ�������������I15000��
ժ Ҫ��ᘌ������ɶșC�����ֱ���δ֪�h���Ќ��r�B�ϵĆ��}�������һ�N���ڭh����Ϣ���B�U�C�����I�r·��Ҏ�����������õѿ������g�ȵ��ϵK��z�y��Ϣ�������ϵK��Ŀ��gģ�ͣ�������ԓģ���OӋһ�N���چ��lʽҎ�t�ęC����·��Ҏ���㷨��ԓ�㷨����y������·����ͨ�^ģ�������õ���һλ���c��ͨ�^�����M��õ����_ԓλ���c��·������mallab�����ÙC���˹����佨����puma560�͙C���˵��\�ӌWģ�ͣ������\�ӿ��g�O���ϵK���ԓ�㷨�M�з�������������Y���f���������·��Ҏ���㷨�������^�̕r�g����ɱ����\�ӣ������^�õČ��r�ԣ�ͬ�r�\���P���ĽǶ�׃���������^ƽ�����\���Л_�����^С���@Щ���cʹ������ڌ��H������ʹ��
�P�I�~���C���ˣ�·��Ҏ�����h��ģ�ͣ����l�㷨
�ЈD���̖��tp 27 �īI���R�aia
1���� ��
�C����·��Ҏ���Ǹ���Ҫ�_����Ŀ���ˑB���܇��ϵK����Ϣ�����ƙC���˱��_�ϵK���_��Ŀ���ˑB��·��Ҏ����Ҫ����ȫ��Ҏ���;ֲ�Ҏ���������ȫ��Ҏ������w e��howden����ĖŸ����A�ϰlչ�������˷���Ҫ֪�������ĭh����Ϣ�����÷������ޡ��ֲ�·��Ҏ�������ϵK��ģ��ӳ�䵽�Y�����g��c-space�����ͽ����˹��݈�2�N������������������һ���Ć��}����latombe���������c-space�����S���P���B�U���������ӏ��s�ȳɎμ���������vladimir lumelskv��ԓ��Փ�����ڶ����ɶșC����puma560����ȡ�úܺõĿ���Ч�������Դ����P���������Ӻ�����㷨�O�ȏ��s�Ć��}����khatib������˹��݈�Ӌ����С�����r�Ժ��Үa����·�����^ƽ������������ֲ�ƽ���c��ֹͣ�\�ӡ��F���C����·��Ҏ��˼�뼯���ڌ����ܿ��Ʒ������о��������ǻ���ģ������Ҏ�t��·��Ҏ��Խ��Խ�ܵ���ҕ����m�����ֱ�ӻ��ڂ�������Ϣ�ͭh��ģ�͵�·��Ҏ��˼�룬���dž��}�����S���ϵK������P�����������ӣ����Fģ���Q��Ҏ�t��ը�Ć��}��
����ӑՓ��һ�N���ڭh����Ϣ�Č��r·��Ҏ�������������������@�õĭh����Ϣ�����S���g��ֱ�ӽ����ϵK��ģ�ͣ������Æ��lʽ���㷨�������û���ģ���Q�ߵIJy����ʽ�Ŀ���Ҏ�t���ں��ж����ϵK���·��Ҏ�����}�ϣ����^��Ч����
2�C�����\��ϵ�y������
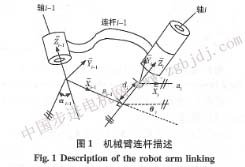
1)�Cе���B�U���������IJ�����denavit�ͷ���Ľ̌W�c���й���hartenberg�����ͨ��d-h��������һ��4��4�A���R��׃�Q��������������B�U�Ŀ��g�Pϵ���Cе���B�U����D1��ʾ��
���x����4��������
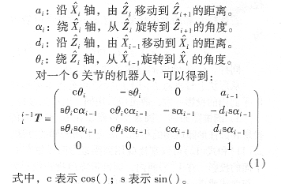
�����B�U׃�Qii-1t��i=1��2������n����˵õ���
ʽ�У�ont�������׃�Q��ꇣ���ʾĩ���B�U����ϵ{n}�����ڻ�����ϵ��������
����׃�Q��ꇣ��ٸ��������P��λ�Â�������ݔ�����õ������P��׃��qi(i=l��2������n)��ֵ���������ont��
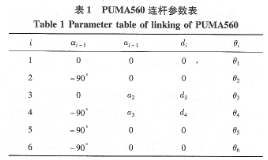
2) puma560������\�ӌWģ����ǰ�����ݣ��ɽ���unimat/on��˾�������ɶ��D���P��������puma560���\�ӌWģ�͡��Cе�۽Y����̎���ٽo�����B�U������Ҋ��1��
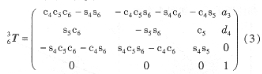
���^Ӌ�������Cе����Ҫ���\�ӌW������ʽ(3)��ʾ�����f�����Ӌ��C��������ϵ{3}����������ϵ{0}��λ�ˡ�
ʽ�У�c5��cos��5�Ŀs����s5��siri��5�Ŀs���ȡ�
�Mһ������matlab�ęC���˹����䣬�ɽ���puma560�C���˵��\�ӌWģ�ͣ���D2��ʾ�� |