�y(t��ng)Ӌ(j��)���m��(y��ng)�������Ʒ�������Ч�Է���
����1���O��1��������2��������1
1���(y��ng)������W(xu��)��Ϣ�ƌW(xu��)�c���̌W(xu��)Ժ���|�����(y��ng)110159��2���(y��ng)���I(y��)��W(xu��)늚�̌W(xu��)Ժ���|�����(y��ng)110023
ժ Ҫ�����ڿ���Ԫ�Ľy(t��ng)Ӌ(j��)���m��(y��ng)�������Ʒ���������(j��)�z�y(c��)��(sh��)��(j��)���������A(y��)�y(c��)�������Ʒ��������Ʒ������(du��)�y(t��ng)Ӌ(j��)���m��(y��ng)�������Ʒ�����(sh��)�H�\(y��n)�����еĿ��ܽM�B(t��i)�M(j��n)�з����о���ͨ�^�����ʎ�M�B(t��i)����Ч���ƽM�B(t��i)���oЧ���ƽM�B(t��i)�������ƽM�B(t��i)���ʷ���ȶ����{(di��o)��(ji��)�����������C��ԓ�����܉�ʹ�r(sh��)�g�B�m(x��)�Ŀ���ԪȺ�Ք��ڽy(t��ng)Ӌ(j��)****�����f���y(t��ng)Ӌ(j��)���m��(y��ng)�������Ʒ����к�(qi��ng)�Ŀ��ɔ_�������o���˻��ڿ���Ԫ�Ľy(t��ng)Ӌ(j��)���m��(y��ng)�������Ʒ����đ�(y��ng)���I�����M(j��n)һ���f��ԓ�����ڹ��I(y��)���ܿ���ϵ�y(t��ng)�Ќ�(du��)�ڷǾ���ģ�M�����Ƶ���Ч�ԡ�
�P(gu��n)�I�~��Ƕ��ʽϵ�y(t��ng)����ɢ����ϵ�y(t��ng)�����ܿ��ƣ��Ǿ���ģ�M������
�ЈD���̖(h��o)��tp 273 �īI(xi��n)��(bi��o)�R(sh��)�aa
1����
��Ƕ��ʽ��ɢ����ϵ�y(t��ng)�У���(du��)�ڷǾ��ԡ��o���w��(sh��)�W(xu��)ģ�͵ı��،�(du��)��Ŀǰ�������(j��ng)�W(w��ng)�j(lu��)��ģ��̎�����z���㷨�����ܿ����㷨��(sh��)�F(xi��n)���ơ��@Щ���ܿ����㷨��Ȼ�ǟ��T�о��n�}��
ģ�����ƵČ�(sh��)�|(zh��)�nj����P(gu��n)�I(l��ng)��Č���֪�R(sh��)���쾚�����ˆT�Ľ�(j��ng)�(y��n)���D(zhu��n)�Q��ģ���Z(y��)��Ҏ(gu��)�t��ͨ�^ģ��������ģ���Q�ߣ���(sh��)�F(xi��n)��(du��)��(f��)�sϵ�y(t��ng)�Ŀ��ơ����˵�֪�R(sh��)�ͽ�(j��ng)�(y��n)�����ģ��y�Ԙ�(g��u)�����(zh��n)�_������(sh��)�r(sh��)����ϵ�y(t��ng)���Ơ�B(t��i)���`�ٺ���(sh��)���z���㷨��Ⱥ�w���������cȺ�w�����Ђ�(g��)�w֮�g����Ϣ���Q���m���ڏ�(f��)�s�ͷǾ��Ԇ��}�Č���(y��u)�����ڌ���(y��u)��Ҫ�^�L(zh��ng)�ĕr(sh��)�g�����y���ڌ�(sh��)�r(sh��)ϵ�y(t��ng)�ĸ��ك�(y��u)�����ƣ���(j��ng)�W(w��ng)�j(lu��)��ͨ�^��(du��)����ϵ�y(t��ng)�M(j��n)�ЌW(xu��)��(x��)��Ӗ(x��n)���팍(sh��)�F(xi��n)���ơ��W(xu��)��(x��)������Ęӱ���(sh��)��(j��)��һ���ĕr(sh��)�g������Ʉ�(d��ng)�B(t��i)Ӗ(x��n)�����o����(y��ng)��(du��)��(sh��)�r(sh��)����ϵ�y(t��ng)��ͻ�l(f��)�¼���
ᘌ�(du��)��(d��ng)ǰ���е����ܿ����㷨��ȱ�ݣ��īI(xi��n)[10]���īI(xi��n)[11]����˻��ڿ���Ԫ�Ľy(t��ng)Ӌ(j��)���m��(y��ng)�������Ʒ������īI(xi��n)[11]�У���������˽y(t��ng)Ӌ(j��)���m��(y��ng)�������������O(sh��)Ӌ(j��)�������īI(xi��n)[10]��(du��)ԓ�����M(j��n)�����^Ԕ��(x��)Փ�����o����10��(g��)�������Ơ�B(t��i)�Ŀ��Ʒ��������Č�ͨ�^�y(t��ng)Ӌ(j��)���m��(y��ng)�������Ʒ������Ք��Է������M(j��n)һ���f��ԓ��������Ч�ԡ�
2�����ʎ�c���ƅ���(sh��)���xȡ
���ڿ���Ԫ�Ľy(t��ng)Ӌ(j��)���m��(y��ng)�������Ʒ���������(j��)�z�y(c��)��(sh��)��(j��)�Ĺ̶������A(y��)�y(c��)�������Ʒ�������(d��ng)�������Ơ�B(t��i)��(sh��)��10��(g��)�r(sh��)���r(sh��)���B�m(x��)�ĔU(ku��)չ����ԪȺ�Ľy(t��ng)Ӌ(j��)���m��(y��ng)��������****���l���M����ʽ��

ԓ�����ѿ���Ԫ�z�y(c��)��(sh��)��(j��)�������Խy(t��ng)Ӌ(j��)�c���ܿ��Ʒ�����������Y(ji��)�ϣ��x��������ڞ����Ԫ��ͨ�^��(du��)��(sh��)�r(sh��)����Ҫ��ļ�(x��)�������������Ԫ��(n��i)�����������������Ơ�B(t��i)�y(t��ng)Ӌ(j��)�D����(du��)���M(j��n)�нy(t��ng)Ӌ(j��)�������ҳ��y(t��ng)Ӌ(j��)��(w��n)��ϵ��(sh��)��ƽ���y(t��ng)Ӌ(j��)��B(t��i)ƫ��y(t��ng)Ӌ(j��)څ��(sh��)���y(t��ng)Ӌ(j��)���{(di��o)��βƫ��ȅ���(sh��)�c�{(di��o)��(ji��)����֮�g���P(gu��n)ϵ���O(sh��)Ӌ(j��)���y(t��ng)Ӌ(j��)�A(y��)�y(c��)���m��(y��ng)ӛ����������������(sh��)�F(xi��n)��(du��)ģ�M���Ŀ��ٌ�(sh��)�r(sh��)���ơ�ԓ������������(j��)��(du��)���،�(du��)���w�\(y��n)�Д�(sh��)��(j��)�Ľy(t��ng)Ӌ(j��)���R(sh��)��ֱ�Ӵ_���µĿ���Ԫ���{(di��o)��(ji��)������������ȡֵ���^����(n��i)�xɢ�ֲ�����(du��)���Ơ�B(t��i)�ķֱ��ʺܸߣ�ֻ��o�������Ŀ��Ɨl�������\(y��n)�С��������Ơ�B(t��i)�ɰ�һ��(g��)�ֹ�(ji��)��ʽ��ȡ���㷨���ô惦(ch��)���gС�����\(y��n)���ٶȿ죬�����ڷǾ���ģ�M����(sh��)�r(sh��)����ϵ�y(t��ng)��ȡ�����^�õĿ���Ч������(du��)�ڕr(sh��)�g�B�m(x��)�Ŀ���ԪȺ�������������Ơ�B(t��i)����ʽ(2)�ėl�����t�Q����Ơ�B(t��i)�������ʎ��
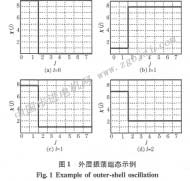
 �����ʎ�M�B(t��i)�Ɍ�(du��)���F(xi��n)������3��(du��)��6�N�M�B(t��i)�������ʎ�M�B(t��i)ʾ������Dl��ʾ��
�����c(di��n)�ǿ��ƽM�B(t��i)�ڌ�(du��)��(y��ng)�IJ���(w��n)����B(t��i)����ʎ���y(t��ng)Ӌ(j��)���m��(y��ng)�������Ʒ������ȑ�(y��ng)�����@�N�������Ơ�B(t��i)�µ������ʎ��
���������������Ơ�B(t��i)�������ʎ��ȡ���{(di��o)���ƅ���(sh��)��****�߶�kzt�IJ���ֵ������{(di��o)��(ji��)������g��
|