���_��ϵ�y�ķ����V�x�A�y����
�����A���ߘs����ӡ��
�����|��W���W�c��Ϣ�WԺ��ɽ�|���_264025��
ժ Ҫ��ᘌ�һ��н粻�_�������xɢ���،�����min-max�������������һ�N�µķ����V�x�A�y����( mmscpc)�㷨�����������ģ���ƽY�������ɔ_�Ͳ��_���ԏı��،����з��x�����������þֲ����h�������M���a����Ȼ�����vlin-max�������������K�˼s���l���D�����н粻�_���������r�����ľ��Է��̣����ͨ�^�����ꇵ�moore-penrose�棬�õ��˽K�˼s�����Է��̵�ͨ�⣬���Y������ָ�˺��������****�����ɡ����挍����C��ԓ�����ķ���Ч����
�P�I�~�������V�x�A�y���ƣ���ģ���ƣ��н粻�_���ԣ�min-max������nioore-penrose��
�ЈD���̖��tp 27 �īI���R�a��a
1����
�����V�x�A�y����(scpc)��ᘌ��V�x�A�y����(gpc)�㷨ȱ�������Ա��C�������һ�N���M�㷨il��ԓ�㷨�ĴֽY��������ģ�ͺ��^��ƥ�����r�µõ��ġ�Ȼ���ڌ��H��r�У������r׃���ⲿ�_�ӽ������ڣ�����ģ�ͺ��^�̲�ƥ�䣺
����ģ�Ͳ��_��ϵ�y��rossiter��12�������ɳ�׃���K�˼s��( svec)������ͨ�^��ݔ��s���ĺ���������ʹԓ�����܉�̎���н�ɔ_���}��ͬ�r�܉��Qģ�Ͳ��_���ԡ�������ͨ�^�ھ���������Q���_���Ԇ��}�ġ�
ᘌ����Ѕ����r׃�ı��،���romas�ȽY�ϝL�ӕr���A�y����( crhpc)�㷨��bdu�㷨�������crhpc-bdu�㷨��Ȼ����ԓ�����]�п��]�ⲿ�_�ӵĴ��ڡ�
����ͨ�^�����ģ���ƽY�������ɔ_�Ͳ��_���ԏı��،����з��x�������Y��min-max�������������һ�N�µķ����V�x�A�y����( mmscpc)�㷨����ͨ�^�c�īI[5]��crhpc-bdu�㷨�M�з�����^������Cԓ�����ķ���Ч����
2���_��ϵ�y�ķ����V�x�A�y����
1)��ģ���ƽY�����]���¾��Ѕ����r׃�ʹ����ⲿ�_�ӵľ����xɢϵ�y��
ϵ�y(1)�������¾���һ�A���Еr�������xɢģ��cm(z)�����ƣ�
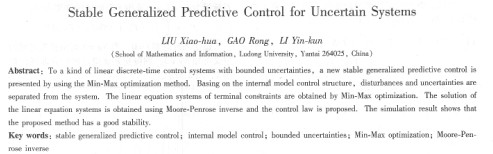
����z���f����gp(z)��gm(z)��gc(z)�քe��ʾ����ģ�͡�������������������z-1������ʽ�M�ɣ�r(z)��v(z)�քe�酢��ݔ����ⲿ�_�ӣ�u(z)��y(z)�քe��ϵ�y��ݔ���ݔ���������ģ���ƽY������D1��ʾ��
��ϵ�y��ʾ��ģ�ͺ͔z�Ӄɲ��֣�����
��ģ�ͽ���ϵ�y�������`����>0��Ҳ����cm (z)������M���cm (z)��q�ķ������ԕr��׃ϵ�y����ˣ��ڿ��]�����r׃���ⲿ�_�ӵ���r�£��D1ϵ�y�ĵ�Ч��D����D2��ʾ��
�ɈD2���Կ�����ͨ�^�����ģ���ƽY�������Ԍ����_���ԣ�ϵ�y�Ѕ����r׃���ⲿ�_�ӣ��Č����з��x�����������þֲ����h����cm (z)�����M���a�����Ķ�ʹϵ�y����һ���ķ����ԡ����⣬������ģ����ԭ�����ڷ���ͨ���м���V����߀����ʹϵ�y���ɔ_��һ�����������á�
2)�A�yݔ�������D2��ʾ�Ŀ��ƽY����֪��ϵ�y���A�yݔ��y(z)��y(z)�ͦ�y(z)�ɲ��֘��ɣ�����
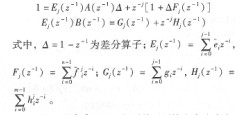
���]ģ��(2)��ʹ������diophantine���̣�
�����īI[6]�����Եõ����A�yݔ�����_ʽ��
|