│Ū╩ąäėæBĢrķgūŅČ╠┬ĘÅĮšTī¦ŽĄĮyīŹ¼F蹊┐
äóÅł└ūŻ¼╩Ęųę┐Ų
Ż©╬„▒▒╣żśI┤¾īW░ūäė╗»īWį║Ż¼Ļā╬„╬„░▓71 0129Ż®
š¬ ꬯║Š═│Ū╩ą┬Ę═¼äėæBĢrķgūŅČ╠┬ĘÅĮšTī¦ŽĄĮyĄ─īŹ¼Fš╣ķ_蹊┐Ż║ßśī”ÓÅĮė▒Ē║═ÓÅĮėŠžĻćį┌▒Ż┤µ═Ļš¹Ą─┬ĘŠWą┼ŽóĢr│÷¼FĖ▀╚▀ėÓ▓óī¦ų┬╦ŃĘ©ėŗ╦ŃĢrķg│╔▒Čį÷╝ėĄ─¼FŽ¾Ż¼ęįĖ─▀MĄ─Ū░Ž“ĻP┬ō▀ģĮYśŗū„×ķ┬ĘŠWĄ─┤µā”ĮYśŗŻ¼▓óę└┤╦ī”dijkstra╦ŃĘ©▀MąąĖ─▀MŻ¼ė├ė┌┬ĘŠW╣سcų«ķgäėæBĢrķgūŅČ╠┬ĘÅĮĄ─Ū¾╚ĪŻ¼į┌┤╦╗∙ĄA╔ŽŻ¼╗∙ė┌╩ąģ^īŹĢrĮ╗═©┴„öĄō■║═ŽÓ╬╗┼õĢrą┼ŽóŻ¼ĮY║ŽĖ▀Š½Č╚Į╗═©ļŖūėĄžłDŻ¼ķ_░l┴╦¢|▌Ė╩ąäėæB┬ĘÅĮšTī¦ŽĄĮy▀MąąīŹ“×Ę┬šµĪŻįōŽĄĮyßśī”Ė─▀M║¾Ą─╦ŃĘ©┼cįŁ╦ŃĘ©Ą─▓Ņ«ÉŻ¼įOų├┴╦ņoæB║═äėæBā╔ĘNūŅČ╠┬ĘÅĮėŗ╦Ń─Ż╩ĮŻ¼ī”ā╔ĘN─Ż╩ĮĄ─ėŗ╦ŃĢrķg║═ėŗ╦ŃĮY╣¹▀Mąą┴╦ī”▒╚ĪŻĮY╣¹▒Ē├„Ė─▀M╦ŃĘ©─▄ē“į┌▓╗į÷╝ėĢrķgÅ═ļsČ╚Ą─Ū░╠ߎ┬Ż¼│õĘų┐╝æ]äėæBĮ╗═©┴„ĀŅørĪóĮ╗▓µ┐┌Ž▐Ž“║═▐DŽ“čėš`Ż¼ėąą¦ĮŌøQ│Ū╩ą┬ĘŠWäėæBĢrķgūŅČ╠┬ĘÅĮå¢Ņ}ĪŻ
ĻPµIį~Ż║äėæBĢrķgūŅČ╠┬ĘÅĮŻ╗Ū░Ž“ĻP┬ō▀ģŻ╗dijkstra
╔ĻłDĘųŅÉ╠¢Ż║tp 27 ╬─½Iś╦ūR┤aŻ║a
1ę²čį
│Ū╩ą┬ĘŠWäėæBĢrķgūŅČ╠┬ĘÅĮĄ─ėŗ╦ŃŻ¼▓╗āHę¬┐╝æ]Į╗▓µ┐┌ų«ķg┬ĘČ╬╔ŽĄ─ąą│╠ĢrķgŻ¼▀ĆąĶę¬┐╝æ]Į╗▓µ┐┌Ė„▐DŽ“Ą─ą┼╠¢ŽÓ╬╗čėš`║═▐DŽ“Ž▐ųŲĪŻę“┤╦Ż¼┬ĘŠWĄ─┤µā”ĮYśŗ▓╗āHę¬─▄ē“┤µā”┬ĘČ╬ÖÓųžŻ¼▀Ćę¬¾w¼FĮ╗▓µ╚š╣سcūį╔ĒĄ─ÖÓųžĪŻ
ĮŌøQ▀@éĆå¢Ņ}Ą─ę╗░Ń╦╝┬Ę╩Ū═©▀^│Ū╩ą┬ĘŠW▐DōQ─Żą═Ż¼░č╣سcÖÓųž▐DōQ×ķ▀ģĄ─ÖÓųžŻ¼Å─Č°īŹ¼F│Ū╩ą┬ĘŠWłDŽ“Ųš═©┘xÖÓėąŽ“łDĄ─▐DōQŻ¼į┘└¹ė├ÓÅĮėŠžĻć╗“ÓÅĮė▒Ē┤µā”▐DōQ║¾Ą─ėąŽ“łDĪŻ
▒Š╬─╩ūŽ╚Š═ÓÅĮėŠžĻć╗“ÓÅĮė▒Ē┤µā”▐DōQ┬ĘŠWą┼Žó▀@ę╗ĘĮĘ©š╣ķ_Ęų╬÷Ż¼ųĖ│÷┴╦╦³╚▌ęūįņ│╔┤µā”┐šķgĖ▀╚▀ėÓ▓óī¦ų┬╦ŃĘ©ųŁ╦ŃĢrķg│╔▒Čį÷╝ėĄ─▒ūČ╦ĪŻė╔┤╦Ż¼▒Š╬─▓╔ė├ę╗ĘNĖ─▀MĄ─Ū░Ž“ĻP┬ō▀ģĮYśŗū„×ķ┤µā”ĮYśŗŻ¼═¼Ģrę└šš┤╦ĮYśŗī”dijkstra╦ŃĘ©▀Mąą┴╦Ė─▀MŻ¼▓óķ_░l┴╦¢|▌Ė╩ąäėæB┬ĘÅĮšTī¦ŽĄĮy▀MąąäėæBĢrķgūŅČ╠┬ĘÅĮŪ¾╚ĪĄ─īŹ“ׯ¼īŹ“×ĮY╣¹▒Ē├„Ė─▀M╦ŃĘ©─▄ē“į┌▓╗į÷╝ėĢrķgÅ═ļsČ╚Ą─Ū░╠ߎ┬Ż¼│õĘų┐╝æ]Į╗▓µ┐┌Ž▐Ž“║═▐DŽ“čėš`Ż¼ėąą¦ĮŌøQ│Ū╩ą┬ĘŠWäėæBĢrķgūŅČ╠┬ĘÅĮå¢Ņ}ĪŻ
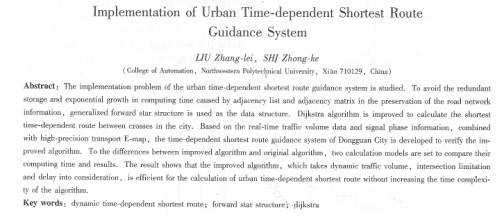
2ÓÅĮėŠžĻć╗“ÓÅĮė▒Ē┤µā”▐DōQ┬ĘŠWą┼ŽóĢrĄ─▒ūČ╦
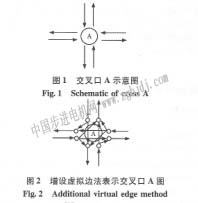
│Żė├Ą─┬ĘŠW─Żą═▐DōQĘĮĘ©ėąā╔ĘNŻ║į÷įO╠ōöM▀ģĘ©║═ī”┼╝łDĘ©ĪŻį÷įO╠ōöM▀ģĘ©Ė∙ō■Į╗▓µ┐┌īŹļHśŗįņŻ©ČĪūų┬Ę┐┌Īó╩«ūųūų┬Ę┐┌╗“Ųõ╦¹Ż®Ż¼īó┤╦Į╗▓µ┐┌╣سc▀Mąąę╗ī”ČÓĄ─öUš╣ĪŻ▓óīóĖ„éĆ┐╔ąąĄ─▐DŽ“ęį╠ōöMėąŽ“ŠĆČ╬╝ėęį▒Ē╩ŠŻ¼įō▐DŽ“Ą─čėš`ī”æ¬ė┌ėąŽ“ŠĆČ╬Ą─ÖÓųĄĪŻ└¹ė├▀@ĘNĘĮĘ©Ż¼┐╔ęįÅ─┬ĘŠWłDųąŪÕ╬·Ąž┐┤│÷Ż¼Į╗▓µ┐┌──ą®╚ļ┐┌Į¹ų╣ū¾▐DŻ¼═¼ĢrļŖ─▄ē“┐┤ĄĮĖ„éĆų▒ąąĪóū¾▐D╗“ėę▐D┬ĘŠĆį┌┤╦Į╗▓µ┐┌Ą─čėš`ĢrķgĪŻĄ½ė╔ė┌į┌Į╗▓µ┐┌▀Mąą╣سcöUš╣ĢrŻ¼╦³īó┬ĘŠWĄ─╣سcöĄöU┤¾┴╦8▒ČĪŻįO│Ū╩ą┬ĘŠW░³└©néĆĮ╗▓µ╚šŻ¼ė╔╔Ž╩÷Ęų╬÷ųąęčų¬ę╗éĆ╩«ūų┬Ę┐┌╣سcĮøį÷įO╠ōöM▀ģ╠Ä└Ē║¾ūā│╔┴╦8éĆ╣سc▒Ē╩ŠŻ¼╚ńłDlŻ¼łD2╦∙╩ŠŻ«
╝┘įOęįÓÅĮė▒ĒŻ║3l┤µā”ėąŽ“łDĄ─ĘĮ╩Į┤µā”▐DōQ║¾Ą─┬ĘŠWą┼ŽóŻ¼▓ó▓╔ė├╦ŃĘ©Å═ļsČ╚Ą─dijkstra╦ŃĘ©▀MąąĢrå¢ūŅČ╠┬ĘÅĮĄ─ėŗ╦ŃŻ¼╦∙ąĶ▀\╦ŃĢrķgŽÓæ¬ę¬öU┤¾64▒ČĪŻī”┼╝łDĘ©╩Ūę╗ĘNą┬ĘfĄ─┬ĘŠWĮYśŗ▒Ē╩Šą╬╩ĮŻ¼īó┬ĘČ╬ęįłDųą╣سc▒Ē╩ŠŻ¼Į╗▓µ╚šĖ„éĆ┬Ę┐┌▐DŽ“ęįėąŽ“ŠĆČ╬▒Ē╩ŠŻ╗┬ĘČ╬Ą─ÖÓųž▐D╗»×ķ╣سcĄ─ÖÓč¼Ż¼Į╗▓µ┐┌Ė„▐DŽ“čėš`▐D╗»×ķŽÓæ¬ėąŽ“ŠĆČ╬Ą─ÖÓųĄĪŻ╦³═¼śė╩╣Ą├┬ĘŠWĄ─╣سcöĄ│╔▒ČĄžöUÅłŻ¼╚ń╣¹ę▓ęįÓÅĮė▒Ēū„×ķ┤µā”ĮYśŗŻ¼ę▓Ģ■ī¦ų┬ėŗ╦ŃĢrķgĄ─│╔▒Čį÷ķLĪŻ
3 Ė─▀MĄ─Ū░Ž“ĻP┬ō▀ģĮYśŗ
Ū░Ž“ĻP┬ō▀ģĮYśŗūŅįńė╔dialĄ╚╚╦į┌1979─Ļ╠ß│÷ĪŻī”ė┌néĆĮ╗▓µ┐┌Ż¼mŚl┬ĘČ╬Ą─│Ū╩ą┬ĘŠWĪŻ▀@ĘNĮYśŗ└¹ė├ę╗éĆę╗ŠSöĄĮMpointednodesŻ¼░┤néĆ╣سcĄ─ŠÄ╠¢Ēśą“Ż¼ę└┤╬▒Ż┤µÅ─Ė„éĆ╣سc│÷░lĄ─ėąŽ“ŠĆČ╬Ą─ĮKų╣╣سcĄ─ŠÄ╠¢Ż¼═¼Ģrė├┴Ē═Ōę╗éĆę╗ŠSöĄĮMtraveltimeüĒ▒Ż┤µĖ„ŚlėąŽ“ŠĆČ╬Ą─ŽÓæ¬ÖÓųĄŻ©ī”ė┌Ģrå¢ūŅČ╠┬ĘÅĮå¢Ņ}Ż¼ÖÓųĄ╚Īįō┬ĘČ╬Ą─ąą│╠ĢrķgŻ®Ż¼pointednodesöĄĮM║═traveltimeöĄĮMČ╝š╝ė├┴╦méĆ┤µā”å╬į¬ĪŻė╔├┐éĆ╣سc│÷░lĄ─ėąŽ“ŠĆČ╬▓╗ų╣ę╗ŚlŻ¼╝┤┬ĘŠWųąĖ„éĆ╣سcĄ─│÷Č╚┤¾ė┌Ą╚ė┌1Ż¼pointednodesöĄĮMųąī”æ¬ė┌├┐éĆ╣سcĄ─ĮKų╣╣سcĄ─éĆöĄę▓╩Ū┤¾ė┌Ą╚ė┌1Ą─ĪŻŪ░Ž“ĻP┬ō▀ģĮYśŗė├ę╗ŠSöĄĮMpointerŻ¼▒Ż┤µĖ„éĆŲ╩╝╣سc╦∙ųĖŽ“Ą─Ą┌ę╗éĆĮKų╣╣سcį┌öĄĮMųąĄ─╦„ę²ųĄŻ¼pointeröĄĮMš╝ė├Ą─┤µā”å╬į¬öĄ┼c┬ĘŠW╣سcöĄ╩ŪŽÓ═¼Ą─ĪŻ
ĮY║ŽŠ▀¾w┬ĘŠWīŹ└²ī”Ū░Ž“ĻP┬ō |