����ͬ��ֱ��ŷ�늄әC��ģ��У������
�S����1��2��������1��3���췽1��3
(1�Ї��ƌWԺ����Ԅӻ��о������|�����110016��2�Ї��ƌWԺ�о���Ժ������100049
3���əC�����Ԅӻ��ɷ�����˾���|�����110168)
ժҪ��ᘌ�ֱ�늄әC�����c�������ģ��У�����Ʋ��ԣ����û��ڿ������V�����Ġ�B�^�y���͔��ֵ��b�V�����ĽY���M�ό�����ϵ�yģ���M��У����ͬ�r���^�y��ؓ�d�D���M���a������Փ�͌�������ԓ�����܉���Ч��������ϵ�y�еĸ��A�ɷ֡��Ǿ������ء����l����ؓ�d�D��׃����Ӱ푣����ֱ��ŷ�ϵ�y�ķ����ԡ������ԺͿ��ɔ_������
�P�I�~��ֱ��ŷ�늄әC��ģ��У�����������V��������B�^�y����ؓ�d�D��
�ЈD���̖��TM341��TM383��4 �īI���R�a��A ���¾�̖��1004��7018(2010)05��0049��04
0����
�S�����ؼ��g�͙C���˼��g�İlչ�����y���ŷ�늄әC��p�������ӷ�ʽ���S���������ѽ����ܝM��Ҫ����Ҫ���þ��и������\�����ܵ�ֱ��ŷ�ϵ�y��ֱ��ŷ�ϵ�y�е��ŷ�늄әC�c���ӵ�ؓ�dֱ�������һ�����g�����ڜp�ٙC���������˂��әC������Ă����`��Ǿ���Ħ�����͏�����׃��Ӱ푣��Ɍ��F�߶�λ���ȼ��߄ӑB푑���ͬ�r߀���е�������S�o�����c�����ֱ��ŷ�ϵ�y�ڙC���ˡ��댧�w�����b�á����ܙC�������ܜyԇ�x�����I�������V���đ���ǰ��[1]��
�mȻֱ��ŷ�ϵ�y���S�����ݣ���ͬ�rҲ�a�����µļ��g���}��һ�����ɔ_�������^�κ����g�h����˥�p��ֱ�����õ�늙C�ϣ�ʹ��ֱ�늄әC���y���D�ء��D�ӑT����늙C������ؓ�d�D�ص�׃��׃�����У�������ϵ�y�Ă��ӺͶ�λ���ȣ���һ���棬ϵ�y���]�h�����^���У�ϵ�yģ���еĸ��A�ɷ�1ģ��У������ԭ�����A����ϵ�y���M�п�����Փ�����Ϳ��Ʋ��Ԍ�ʩ����͵�ϵ�y���乤�̷����͑��÷����ѷdz����졣���ڽ����ŷ�늙C����ϵ�y�@�ӵĸ��A�Ǿ���ϵ�y�������ϳ����了������A����ϵ�y�M�н��Ʒ����������ϵ�yģ���еĸ��A�ɷֺͷǾ������ز��ܺ��ε�ͨ�^ģ�ͺ����ų��r���ݱؕ�����������ϵ�y�ĄӑB���ܺͷ���������^���Ӱ�[7-8]����˱��������ģ��У�����ƣ��������A�Ǿ���ϵ�y��ģ��У������A����ϵ�y�M�п��ƣ��Դ��������A�ɷֺͷǾ��Ե�Ӱ푣�ԓ�㷨�Ļ���ԭ
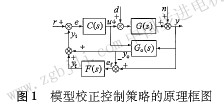
����D1��ʾ��
�D�У�G(s)�鱻�،���(ֱ��ŷ�늄әC)��c(s)���������G��(s)���B�^�y����F(s)���ͨ�V������d���ⲿ�ɔ_��n�Ǹ��l��������ϵ�yݔ��푑�y(s)�����ɲ��֣�����
ʽ�У�yd(s)����A����ϵ�y��ݔ��푑���yn(s)����A�ɷݺ��l����ݔ��푑�����B�^�y����ݔ��y��(s)Ҳ�����ɲ��֣�����
ʽ�У�yod(s)���B�^�y�������^�y�Ķ��A����ϵ�y��ݔ��푑���ye(s)���B�^�y��ģ���c���Hϵ�yģ�͵�ƫ������B�^�y���^�y�Y���ƽ����Hϵ�y���t��
����yh(s)�Ǹ��l���y������������B�±���ȫ�V������ģ��ƫ��ye(s)���е��l���ԣ���ȫͨ�^�V�������õ�У���V������ݔ���飺
��ʽ(7)��֪������ֵ���]�hϵ�y�ж��A����ϵ�y��ݔ��푑���������ģ���еĸ��A�ɷݡ����l����ģ��ƫ���Ӱ푣�ͬ�r�ų��ˆμ�ʹ�õ�ͨ��ͨ�V�������a���ķ�ֵ˥�p��ʧ�����λ����Ȇ��}��
2��B�^�y���OӋ
ģ��У�����Ʋ��Ե��P�I�Ǡ�B�^�y�����OӋ����B�^�y��һ�����ģ��У�������ṩ�����^�yֵ����һ����Ҳ������h���a���㷨�ṩؓ�d�D���^�yֵ���������V�����\��****��Ӌԭ�팦ϵ�y��B׃���M����С�����Ӌ�����ڹ�Ӌ�^��������ģ���`��͜y���`���B׃����Ӌֵ��Ӱ푣�������кܸߵľ��ȣ��������V���������c߀���ڲ����f���㷨�����p�� |