���ڃ�ģ���Ƶ�����ͬ��늄әC�{��ϵ�y�OӋ
���\�£���ɭ���O�d��
(�V�|���I��W���V�|�V�ݣ�510006)
ժҪ��ᘌ�����ͬ��늄әC�ŷ�ϵ�y�����ܵĿ���Ҫ�����һ�N���ڃ�ģ���Ƽ��g������ͬ��늄әC���Ʋ��ԡ��OӋ�ă�ģ���������нY�����Ρ�ֱ�^�������{�������c��ͨ�^ʹ�Ã�ģ���Ƽ��g�OӋ����h����������h�����ܣ�������h�Ļ��A�ϣ����Ã�ģ���Ƽ��g�OӋ�ٶȿ������������ٶȲ��ӣ����Ø�������ģ�͌�ԓ�{��ϵ�y�M�з����о����Y���������Ã�ģ���ƽY���OӋ���{��ϵ�y���D�ٳ��{���͡��D���}��С��푑��ٶȿ�ă��c�����@������ϵ�y�ĸ��S���ܺͿ��_���ܣ��C����ԓ���Ʋ��Ե���Ч�ԡ�
�P�I�~������ͬ��늄әC����ģ���ƣ�����{�������D���g����
��Ȧ���̖��TM341 �īI���R�a��A ���¾�̖��l004��7018(2010)05��0056��04
0����
����ͬ��늄әC(���º��QPMsM)�����w�eС���T���͡�푑��ٶȿ졢Ч�ʺ����ߵȃ��c���V�������ڸ������ŷ��I��
��늙C����ϵ�y���f�������ϳ����ó�ҎPI�{������ϵ�y�M������c�ٶ��{����һ����a���^��ij��{����푑��ٶ�Ҳ������ˣ��ڌ��ӑB����Ҫ���^�ߵĈ��ϣ���늄�܇�vҪ���{��ϵ�y���Ƅӳ��{С���ܔ_�ӕr�ӑB�ٽ�С���֏͕r�g�죬���ó�ҎPI�{�����͕��ܵ�һ���ľ����ԣ����ܝM�����P�����Ҫ��
���IJ��Ã�ģ���Ƶķ�����������ͬ��늄әC�Ŀ����Ќ�����{�������D���{�����M�Ѓ����OӋ�����OӋ�ă�ģ�������ĽY��ֻ��һ�����{�����������@��������ȡֵ�Q�����]�hݔ����푑��ٶȡ�����ͨ�^��Matlab R2007aܛ����ϵ�y�M�н�ģ���棬���F�ˌ�ϵ�y�������Ƶ�Ŀ�ġ�
1 PMsM���Wģ��
PMsM�Ǐ��@��ʽ�D��ͬ���ŷ�늄әC�lչ�����ġ�PMsM�Ķ������������Q�@�M���F�Ę��ɣ�����ͨ����Y���B�ӣ����Ɍ��Q�������늘��@�M�����Ԯa�����ҵĸБ�늄ݲ��Σ����D�ӽY���ϣ�PMsM�Ï����˴ŵ������wȡ����ͨ늄әC��늄�ţ��Ķ�ʡȥ�˄�ž�Ȧ�����h���ˢ�����˽������Ҳ�PMsM�Ĕ��Wģ�ͣ����ȼ��O��
(1)����늄әC�F�ĵ�����ͣ�
(2)��Ӌ늄әC�Ĝu���ʹŜ��p�ģ�
(3)늄әC������錦�Q���������������
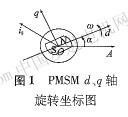
����PMsM��ȡ�����w������Ŵň��S��(�ŘO�S��)����ֱ�S����Qd�S���������D�����D����ǰd�S90��늽Ƕ����齻�S����Qq�S����4���@�M�S�����酢���S������d�S�c�����S֮�g��늽ǶȞ�a����d��g�S�t��늽��ٶ�w�Sͬ�D��һ�����D�������ˈD��D1��ʾ��
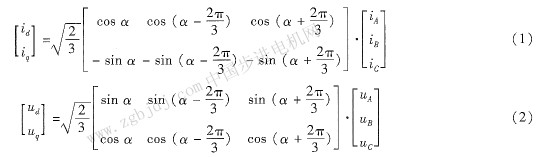
�����D1���Ⱥ��^clarke׃�Q(�������oֹ����׃�Q�������oֹ����)��Park׃�Q(�Ƀ����oֹ 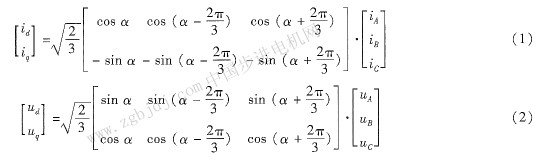 MsM�ж����@�Mһ���o�о���Y���B�ӣ��t��iA+iB+ic=0��
ʽ�У�ud,uq��d��q�S����늉���id��iq��d��g�S�����������d����q��d��q�S���Ӵ�朣�R�鶨�����Ld��Lq��d��g�S����늸У���f���D���ϵ������w�a���Ĵńݣ�J���D�ӑT����TL��ؓ�d�D�أ�Te��ݔ���D�أ�B��ճ��Ħ��ϵ������r���D�ӽ��ٶȣ��؞��D��늽��ٶȣ���=P�أ�p��O������
2��ģ���������OӋ
2��1��ģ�����������c
��ģ�������Ļ���˼�����c���،���һ���c����M��һ�µĘ˷Qģ�ͣ�������ݔ���c���H�����ݔ��֮�������������ݔ��ˣ������ƅ�����׃����ģ��ʧ���c�ⲿ�ɔ_��̖�������ϵ�y�������Ժ����Ƹɔ_������
����ģ�������M���OӋ�r���փɂ����E����һ�������r�����]ϵ�y�������Ժͼs���ԣ��OӋ��һ�������Ŀ��������ڶ��������뷴���V������ݔ��V��������ͨ�^�{���V�����ĽY���ͅ������@�������ĄӑB���ܺ������ԡ�
�D2�������ģ���ƽY���D[1,5]��Gp�鱻�،���Gm�鱻��ģ��(�������،���ӑB�О�Ļ��Aģ��)��Cm��ǰ����ģ����������ģ��ƥ��r��������׃�Q���������D���ˣ�[2]���ɽ������������Pϵʽ��
|