�����ɶșCе��܉�EҎ���c�����о�
�O�����R��������
���������I��W�����Ϣ�c���ƹ��̌WԺ������100124��
ժ Ҫ��ᘌ������ɶ��ʽ�Cе�����M�����\�ӌW�����\�ӌW�Լ�܉�EҎ������r������ֱ�^����C�\�ӌW�㷨�����_�Ժ�܉�EҎ����Ч���������_�����Cе�۔��Wģ�͵Ļ��A�ϣ����c�����˙Cе�����P�����g��܉�EҎ���ăɷN���F���������������r�\�ӷ����M������C���_�l��һ�������ɶșCе�����r����ܛ����ԓ����ܛ����vc++6 0�_�lƽ�_�ϣ��������÷ָ������nifc��ܵĴ��ڷָ�ɞ�������ں�ҕ�D���ڃɲ��֣�Ȼ������openci�ĈD�΅����Cе���M�н�ģ���״Ό����\�ӌW�����\�ӌW�Լ�܉�EҎ���㷨���������_�l����һԓ����ܛ����Ч����C�˙Cе���\�ӌWģ�ͽ��������_�ԣ�ͬ�rҲ�����ζ��ʽ����ζ��ʽ�ɷN܉�EҎ����������ֱ�^�ı��^���Y��������һ�N܉�EҎ��Ч�����@����ǰһ�N��
�P�I�~���Cе�ۣ��\�ӌW������܉�EҎ�����\�ӷ���
�ЈD���̖��tp 241��tp 391 �īI���R�a��a
1����
�����ɶ��ʽ(6r)�Cе�۵�܉�EҎ���ȿ������P�����g��Ҳ������ֱ�����˿��g���M�С��������P�������M��܉�EҎ����ֱ�����\�ӕr���ܿ�׃��Ҏ��܉�E������Ӌ����С�������r���ƣ����Ҳ����l���C���殐��ji�ȃ��c�����Խ��������á������@�N�����y�Դ_�����U��ĩ��ץ����λ�ã������_�lһ���܉�ֱ�^�رOҕ�Cе�۸��������\�ӵ����S����ܛ��׃�ØO����Ҫ���īI[2]��ƽ�_���_�l��robotics�����䣬�܉�ͨ�^�������F���C�����M���������\�ӌW�Լ�܉�EҎ�����������F�˺��ε��\�ӌW���档�īI[3]����opencl�D�Ύ��_�l��һ�יCе�۷���ϵ�y�����F�˙Cе�۵��������\�ӌW���档�īI[4]�����īI[3]�ķ�������ͨ�^���r��������ˢ��ҕ�D���_���˄Ӯ���Ч�������Dz��]���ṩ���w��܉�EҎ���㷨�������״Ό�܉�EҎ���㷨�����_�l�������ɶșCе�����S����ܛ���У���Чֱ�^����C�˃ɷN��ֵ����܉�EҎ����Ч����
2�\�ӌW����
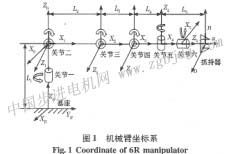
�Cе������ϵ����Dl��ʾ��
6r�C�����Ǿ���6���P���Ŀ��g�C����������ĩ�ˈ������ڿ��g��λ�ú��ˑB��������ÿ���P���Ͻ���һ������ϵ����������ϵ֮�g���Pϵ������ĩ�ˈ�������λ�á�
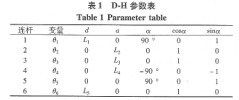
1���\�ӌW�������\�ӌW������^���Ǹ�����֪�P��׃����1����2����3����4����5����6����ĩ��ץ���������څ���������ϵ��λ�˵��^�̡�ʹ�ؘʵ����P��d-h��������������ϵ�O��6r�Cе�۵Ļ����ϣ��Ļ����_ʼ׃�Q����һ�P����Ȼ�ڶ��P�������׃��������ץ������6r�C���۵Ļ�������֮�g�Ŀ�׃�Q��
ʽ�У�a0���������ϵ������ϵ0���P��һ��֮�g��׃�Q��ꇣ�a1������ϵ0������ϵ1֮�g��׃�Q��ꇣ�ah������ϵ5������ϵ��֮�g��׃�Q��ꇣ�s12= sin����1+��2����cl2=cos(��1+��2)��s123=sin����1+��2+��3����
���������P�����B�U�����ı���Ҋ��1��
2)�\�ӌW������\�ӌW������^���Ǹ�����֪��ĩ��ץ���������څ�������ϵ��λ�ˣ����P��׃����1����2����3����4����5����6���^�̣����ǙC�����\��Ҏ����܉�E���ƵĻ��A��Ҳ���\�ӌW����Ҫ�IJ��֡��Ƚo���C���˵�����λ�˱��_ʽ��
ʽ(2)��ʽ(1)��һ���_��ʽ������n��o��a�քe��ʾ������ָ��ͽӽ�������p������ĩ��ץ��������ϵԭ�c�����ڻ�������ϵ��λ��������ͨ����p���Ը�������λ�ýo������n��0��a�@������������ͨ�^rpy���L�ӽǦ�n�������Ǧ�0��ƫ���Ǧ�a�����D�o������ʽ(3)��ʾ��
|