��ϵ�y(t��ng)�ßoˢֱ��늄әC�����о�
���ɱ�12��������1
��1�����I���I(y��)��W(xu��)늚�̼��Ԅӻ��W(xu��)Ժ�������I150001
2��cʯ�͌W(xu��)Ժ늚���Ϣ���̌W(xu��)Ժ�������I163318��
ժҪ�������oˢֱ��늄әC( bldcm)�����ϵ�y(t��ng)��ԭ�әCԔ�����M���˷����������˔�(sh��)�W(xu��)ģ�͡����������ٶ�ģʽ�µ��ٶ��ŷ����ԺͿ�ؓ�d�_���M����Ԕ���ķ��挍���挍�Y(ji��)�������oˢֱ��늄әC�ڷ�(w��n)�B(t��i)�̈́ӑB(t��i)��r�¾��з�(w��n)�B(t��i)���ȸߡ��ӑB(t��i)푑�(y��ng)��ă�(y��u)�����ܣ���ȫ�M���ϵ�y(t��ng)��Ҫ��
�P(gu��n)�I�~���oˢֱ��늄әC����ϵ�y(t��ng)���ٶ��ŷ�������
�Ї����̖��tm36 +1 �īI��־�a��a ���¾�̖��1001-6848(2010)05-0038_03
0�� ��
��C�����w�������~�Ĉ�(zh��)���b�ã����܁���Ӌ��C�́��Ŀ��ƽ�������Բٿv�����ƫ�D(zhu��n)�Ƕȣ��Ķ��a(ch��n)��һ�����q����أ��Ա����������ˑB(t��i)�����ڲ���������ŷ��ýy(t��ng)�Q֮���ϵ�y(t��ng)����ϵ�y(t��ng)���w�������~����ϵ�y(t��ng)����ȱ�ٵĽM�ɲ��֣��ŷ�ϵ�y(t��ng)�Ąӡ��o�B(t��i)ָ��ֱ��Ӱ푿���ϵ�y(t��ng)�����͓ܺ���Ŀ�˵������ʡ����ڶ�ϵ�y(t��ng)һ�����ֱ��늄әC����ԭ�әC��(zh��)��Ԫ����ֱ��늄әC�������õ����ӡ��Ƅ����ܣ������ڌ�������(n��i)ƽ���{(di��o)�١���ֱ��늄әC���ˢ���Cе�Q���b�ã��a(ch��n)����늴Ÿɔ_�������Ķ�����w�������~���[���Ա��^�ͬ�r�D(zhu��n)�ٲ���̫�ߣ�Ҳ�Ƽs����C���`���ԺͿ����ԡ�
�oˢֱ��늄әC����ӓQ���b��ȡ����ֱ��늄әC�ęCе�Q���b�ã������˷���ֱ��늄әC��ȱ�c�����Ҿ����\��Ч�ʸߡ��o��œp���Լ��{(di��o)�����ܺõ��T����(y��u)�c���ڬF(xi��n)����ϵ�y(t��ng)�O(sh��)Ӌ�r�������ßoˢֱ��늄әC�����C��ԭ�әC��
�����˽����˟oˢֱ��늄әC��(sh��)�W(xu��)ģ�ͣ�����(j��)�˽����oˢֱ��늄әC�ڶ�����(d��o)ͨ���Ʒ�ʽ��matlab����ģ�ͣ��o��Ԕ���ķ��挍�Y(ji��)�������Է��������o������(y��ng)�ĽY(ji��)Փ���oˢֱ��늄әC�Ĕ�(sh��)�W(xu��)ģ��
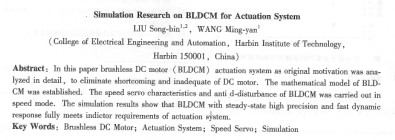
�oˢֱ��늄әC�����·��Dl��ʾ��ݔ��ֱ��ĸ��늉���udc��vf1��vf3��vf5��p�ϵ�m(x��)osfet�����ƽ��(d��o)ͨ��vf2��vf4��vf6��n�ϵ�m(x��)osfet�����ƽ��(d��o)ͨ��
���O(sh��)���ٺ����X��Ч��(y��ng)�����@�M����ֲ��ڹ⻬�Ķ��Ӄ�(n��i)���棬�������@�M���Q�����@�M��늕r������϶�ň���Ӱ푺��Բ�Ӌ������(j��)�oˢֱ늄әC�����ԣ����䔵(sh��)�W(xu��)ģ�����£�
늴��D(zhu��n)�ط��̞飺
��ţ�D�ڶ����ɣ����\�ӷ��̞飺
2 matlab�����о�
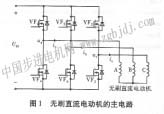
����(j��)ʽ(1)~ʽ(3)��(g��u)���oˢֱ��늄әCmatlab����ģ�Ϳ�D��D2��ʾ��
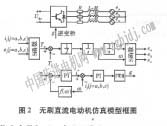
���慢��(sh��)���£�ֱ��ĸ��늉�udc= 200 v�������@�M���r=2.5 �أ�l-m= 11. 2 mh���D(zhu��n)�ӑT��j=0��008 kg��m2���O����(sh��)np=1;ؓ�d�D(zhu��n)��tl=2 n-m���o���D(zhu��n)��n =500 r/min�����Ʒ�ʽ�����(d��o)ͨģʽ������Y(ji��)�����£�
bldcmݔ�����D(zhu��n)�ٲ�����D3��ʾ�����{(di��o)���ٷ�֮27. 4���{(di��o)���r�g16 ms������Y(ji��)�����Կ�����bldcm���_ʼ���ӵ��_��(w��n)�B(t��i)��푑�(y��ng)�r�g�죬��(w��n)�B(t��i)���ȸߡ�
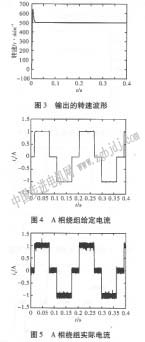
a���@�M�o������͌��H����քe��D4���D5��ʾ���ķ���Y(ji��)�����Կ��������H������S�o�����׃���������(n��i)�h(hu��n)���S���Ժá�һ��������(n��i)�h(hu��n)У����i��ϵ�y(t��ng)��
bldcmݔ���Č��H�D(zhu��n)�ز�����D6��ʾ���{(di��o)���r�g16 ms��늴��D(zhu��n)�ص���ؓ�d�D(zhu��n)�ء��D(zhu��n)�ط��ֵ0.4 n.m���D(zhu��n)�ؼy�������_�P(gu��n)�ܲ����Q�� |