Ėąæ¬ļŖÖCš{╦┘ŽĄĮyĄ──Ż║²╔±ĮøŠWĮj┐žųŲ蹊┐
č”ä”õhŻ¼äóć°║Ż
Ż©ĮŁ╠K┤¾īWŻ¼µéĮŁ212013Ż®
š¬ę¬Ż║ßśī”ČÓūā┴┐ĪóĘŪŠĆąįĪóÅŖ±Ņ║ŽĄ─Ėąæ¬ļŖÖCš{╦┘ŽĄĮyŻ¼é„ĮyĄ─pid┐žųŲ║═─Ż║²┐žųŲŠ∙▓╗─▄▀_ĄĮ└ĒŽļĄ─┐žųŲą¦╣¹Ą─å¢Ņ}Ż¼ę└ō■┐šķg╩Ė┴┐┐žųŲ└ĒšōĮ©┴ó┴╦Ėąæ¬ļŖÖCĄ─öĄīW─Żą═Ż¼╠ß│÷┴╦ę╗ĘN╗∙ė┌─Ż║²╔±ĮøŠWĮjĄ─Ėąæ¬ļŖÖCš{╦┘ŽĄĮy┐žųŲĘĮĘ©Ż¼▓óŪęį┌╗∙ė┌╔±ĮøŠWĮjļxŠĆė¢ŠÜĄ─╗∙ĄA╔Ž╠ß│÷┴╦į┌ŠĆš{š¹ŠWĮjģóöĄĄ─▓▀┬įŻ¼īŹ¼F┴╦Ėąæ¬ļŖÖCš{╦┘ŽĄĮyĄ─Ė▀Š½Č╚┐žųŲŻ¼▓ó═©▀^Ę┬šµ▀Mąą┴╦Ęų╬÷蹊┐ĪŻĮY╣¹▒Ē├„Ż¼ŽĄĮyŠ▀ėąā×┴╝Ą─äėņoæBąį─▄Ż¼Ūęī”ļŖÖCģóöĄĄ─ūā╗»┼cžō▌dö_äėŠ▀ėą▌^ÅŖĄ─¶ö░¶ąįĪŻ
ĻPµIį~Ż║─Ż║²╔±ĮøŠWĮjŻ╗Ėąæ¬ļŖÖCŻ╗š{╦┘ŽĄĮyŻ╗į┌ŠĆ┐žųŲ
ųąłDĘųŅÉ╠¢Ż║tm346 ╬─½Iś╦ųŠ┤aŻ║a ╬─š┬ŠÄ╠¢Ż║1001-6848(2010)05-0053-03
0ę² čį
Ėąæ¬ļŖÖCš{╦┘ŽĄĮy╩Ūę╗éĆÅ═ļsĄ─ÅŖ±Ņ║ŽĄ─ČÓūā┴┐ĘŪŠĆąįŽĄĮyĪŻé„ĮyĄ─pid┐žųŲī”Ėąæ¬ļŖÖCš{╦┘ŽĄĮyģóöĄ║══Ō▓┐žō▌dö_äėūā╗»├¶ĖąĪó¶ö░¶ąį─▄▓ŅĪŻ╬óĘųÄū║╬┐žųŲĘĮĘ©ęį╝░─µŽĄĮyĘĮĘ©ę▓▒╗ė├ė┌Ėąæ¬ļŖÖCĄ─┐žųŲŻ¼Ą½ŲõĮŌ±ŅŠĆąį╗»Ą─īŹ¼FŻ¼ę¬Ū¾½@Ą├ī”Ž¾Ą─Š½┤_öĄīW─Żą═Ż¼ļyęįį┌īŹļHųąšµš²æ¬ė├ĪŻ─Ż║²┐žųŲ║═╔±ĮøŠWĮj┐žųŲŠ∙ī┘ė┌ųŪ─▄┐žųŲĄ─ĘČ«ĀŻ¼Č╝Š▀ėą▓╗ę└┘ćė┌▒╗┐žī”Ž¾Ą─öĄīW─Żą═║═¶ö░¶ąįÅŖĄ─╠ž³cŻ¼─▄ē“║▄║├Ą─┐╦Ę■─Żą═ģóöĄūā╗»║═ĘŪŠĆąįĄ╚▓╗┤_Č©ę“╦žĄ─ė░ĒæĪŻĄ½╚¶īóŲõæ¬ė├ĄĮĖąæ¬ļŖÖCš{╦┘▀@ŅÉÅŖ±Ņ║ŽĄ─ČÓūā┴┐ĘŪŠĆąįŽĄĮyųąŻ¼Č■š▀Č╝Š▀ėąĖ„ūįĄ─ā×╚▒³cĪŻ
▒Š╬─īó─Ż║²╔±ĮøŠWĮję²╚ļĖąæ¬ļŖÖCš{╦┘ŽĄĮyŻ¼ė╔╔±ĮøŠWĮjüĒīŹ¼F─Ż║²═Ų└ĒŻ¼└¹ė├╔±ĮøŠWĮjĄ─īW┴Ģ─▄┴”üĒš{š¹─Ż║²ļ`ī┘║»öĄ║═┐žųŲęÄätŻ¼▓óßśī”Ėąæ¬ļŖiÖCį┌īŹļH▀\ąąųąŻ¼╩▄ļŖÖCžō▌dĪóģóöĄūā╗»ė░Ēæ▌^┤¾Ż¼ė╚Ųõ╩Ū▐DūėļŖūĶį┌ļŖÖC▀\ąąųąĢ■░l╔·▌^┤¾Ą─ūā╗»Ż¼ė░Ēæ┴╦═©▀^ļxŠĆė¢ŠÜĄ─╔±ĮøŠWĮjī”ŽĄĮy┐žųŲĄ─Š½┤_ąį▀@ŅÉå¢Ņ}Ż¼į┌╔±ĮøŠWĮjļxŠĆė¢ŠÜĄ─╗∙ĄA╔Ž╠ß│÷┴╦į┌ŠĆė¢ŠÜš{š¹ŠWĮjģóöĄĄ─ĘĮĘ©Ż¼▀MȰ蹊┐┴╦─Ż║²╔±ĮøŠWĮjį┌Ėąæ¬ļŖÖCš{╦┘ŽĄĮyųąĄ─æ¬ė├Ż¼▓óĮo│÷┴╦Ę┬šµįć“×ĮY╣¹Ż¼ĮY╣¹▒Ē├„┴╦įō┐žųŲĘĮĘ©Ą─ėąą¦ąįĪŻ
1Ėąæ¬ļŖÖCš{╦┘ŽĄĮyĄ─öĄīW─Żą═╝░ŽĄĮyĮYśŗ
ļŖ┴„Ė·█Öą═spwm─µūāŲ„╣®ļŖĄ─Ėąæ¬ļŖÖCūāŅlš{╦┘ŽĄĮyŻ¼║÷┬įūāŅlŲ„Ą─Ģr£■Ż¼į┌▐Dūė┤┼ł÷Č©Ž“Ą─Śl╝■Ž┬dĪóqā╔ŽÓū°ś╦ŽĄŽ┬Ą─ĀŅæBĘĮ│╠┐╔ęįė├ĮĄŠSĄ─╚²ļAĘŪŠĆąį─Żą═├Ķ╩÷Ż║╗šļŖ
╚¶īóūāŅlŲ„įOų├×ķ┤┼ł÷Č©Ž“▀\ąą─Ż╩ĮŻ¼▀@Ģrįō┼_─µūāŲ„┐╔ęį▓╗┐╝æ]┤┼µ£Ą─ūā╗»Ż©╝┤šJ×ķ┤┼µ£║ŃČ©Ūę×ķŅ~Č©ųĄŻ®Ż¼įŁŽĄĮy┐╔ū„×ķå╬▌ö╚ļĪóå╬▌ö│÷ŽĄĮyĪŻ
ŽĄĮyĮYśŗ╚ńłD1╦∙╩ŠŻ¼m×ķĖąæ¬ļŖÖCŲ┌═¹▐D╦┘Ż¼wr×ķĖąæ¬ļŖÖCīŹļH▐D╦┘ĪŻłDųąx1Ż¼x2║═uĘųäe╩Ū─Ż║²╔±ĮøŠWĮjĄ─▌ö╚ļ║═▌ö│÷Ż¼Ųõšōė“Š∙įO×ķ[oŻ¼1]Ż¼š`▓Ņe║═š`▓Ņūā╗»┬╩Ż╗═©▀^xė│╔õ▐D╗»×ķ╔±ĮøŠWĮjĄ─▌ö╚ļx1Ż¼x2Ż¼╔±ĮøŠWĮjĄ─▌ö│÷u═©▀^uė│╔õ▐D╗»×ķĖąæ¬ļŖÖCĄ─ļŖÜŌ═¼▓ĮĮŪ╦┘Č╚w1ĪŻ
łD1ųąec×ķš`▓Ņ─┐ś╦║»öĄŻ¼Ė∙ō■ecė╔į┌ŠĆė¢ŠÜ╦ŃĘ©┐╔į┌ŠĆš{╣Ø─Ż║²╔±ĮøŠWĮjĄ─ÖÓųĄŻ¼╦∙ęįŽĄĮyŠ▀ėąūįīW┴ĢĄ─╣”─▄ĪŻ
2─Ż║²╔±ĮøŠWĮj┐žųŲŲ„
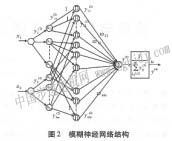
2.1─Ż║²╔±ĮøŠWĮjĮYśŗ
─Ż║²╔±ĮøŠWĮjĮYśŗ╚ńłD2╦∙╩ŠĪŻłD2ųąĄ┌1īėīóx1Īóx2ę²╚ļŠWĮjŻ╗Ą┌óóīėīóx1Īóx2─Ż║²╗»Ż¼▓╔ė├Ą─ļ`ī┘├µöĄ×ķĖ▀╦╣║»öĄŻ╗Ą┌óŻīėī”æ¬─Ż║²═Ų└ĒŻ¼óó▒Ē╩Š─Ż║²▓┘ū„Ż¼▀@└’ė├+│╦Ęe▓┘ū„┤·╠µ╚ĪąĪ▀\╦ŃŻ╗Ą┌óżīėī”æ¬╚ź─Ż║²╗»▓┘ū„ĪŻŠWĮjĄ─▌ö╚ļ▌ö│÷ĻPŽĄ╚ńŽ┬Ż║
Ą┌1īė▌ö│÷╣سcŻ║
Ą┌óóīė▌ö╚ļ▌ö│÷╣سcŻ║
|