�_�P(gu��n)����늙C(j��)�����\(y��n)�����Է����c���Ʋ����о�
���B�W(xu��)1���f����(qi��ng)2
(1��������Ϣ�I(y��)���g(sh��)�W(xu��)Ժ늚��ϵ������223003��2���|��Ж|��늙C(j��)����˾���|�322100)
ժҪ���_�P(gu��n)����늙C(j��)���õ��ǷǾ����·�ͷǾ��Կ��Ʋ��ԣ�������������ܵķ���������(y��ng)���Ʋ��Ե��о��@�����P(gu��n)��Ҫ��������1�_����6/4�Y(ji��)��(g��u)�_�P(gu��n)����늙C(j��)���о��������������\(y��n)�Р�B(t��i)�µĔ�(sh��)�W(xu��)ģ�ͣ��������_�P(gu��n)����늙C(j��)���{(di��o)�ٿ��Ʒ��������քe�����ڵ��١����ٺ�����r�µ��\(y��n)�������M(j��n)���˷�����������_���˸��A������(y��ng)�Ŀ��Ʋ��ԡ�
�P(gu��n)�I�~���_�P(gu��n)����늙C(j��)������ԭ������(sh��)�W(xu��)ģ�ͣ����ܷ��������Ʋ���
�ЈD���̖��tm352; tm359.9 �īI(xi��n)��(bi��o)־�a��a ���¾�̖��1001-6848{ 2010��05-0031-04
0����
�c���y(t��ng)�Ľ���늙C(j��)��ͬ���_�P(gu��n)����늙C(j��)�����p�O�F�ĽY(ji��)��(g��u)������ֻ�ڶ����ϰ��b����@�M���@�M����ķ������c�F�Ĵ�ͨ�ܶȵĸ�����_�P(gu��n)����늙C(j��)�\(y��n)�еăɂ�(g��)���c(di��n)�����⣬�_������늙C(j��)���ƅ���(sh��)�࣬�����`�����������S��늄әC(j��)������B(t��i)�IJ�ͬ��׃�����o���õ����Ρ��y(t��ng)һ��(sh��)�W(xu��)ģ�ͼ�����ʽ����ˣ�����ʹ�_�P(gu��n)����늙C(j��)����ϵ�y(t��ng)�ں܌����ӷ�����(n��i)�\(y��n)���Ҿ��������������ԣ���회��_�P(gu��n)����늙C(j��)���������M(j��n)�з���������������(y��ng)���Ʒ����M(j��n)���о����Ķ��_��ϵ�y(t��ng)�ă�(y��u)�����Ʒ�����
��Ŀǰ�V����(y��ng)�õ�����6/4�Y(ji��)��(g��u)�_�P(gu��n)����늙C(j��)�������������D1��ʾ��
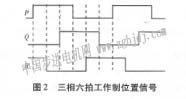
�_�P(gu��n)����늙C(j��)�������^����(�O(sh��)�_ͨ�^(q��)�g��o��~ 45��)������(j��)λ�Ùz�y���l(f��)������̖�����ڵ،�(d��o)ͨ�P(gu��n)������_�P(gu��n)���o�����@�Mͨ늣��Ԯa(ch��n)�������D(zhu��n)�ء���D2��ʾλ����̖���䌧(d��o)ͨҎ(gu��)�ɞ�ac -a-ab-b-bc-c������6/4�Y(ji��)��(g��u)�_�P(gu��n)����늙C(j��)���������Ĺ����ƣ������࣯�p��݆��������
��늙C(j��)��ʼ����˲�g�����D(zhu��n)�ӵ�����λ�ò�ͬ����λ�Ùz�y�����l(f��)���ĸߵ��ƽ�M��Ҳ������ͬ����ʹ���_�P(gu��n)����һ��������(d��o)ͨ���ɵã�
���ڶ��D(zhu��n)��B(t��i)w =0������У�
����ʽ���Կ��������D(zhu��n)��λ�ò�ͬ��������ͬ������i�ܿ�����������ֵimax�a(ch��n)�����D(zhu��n)�D(zhu��n)�أ���ʼ�����D(zhu��n)�أ���
���˺��������^�̣����Ը����@�M��������^�̵IJ�e���J(r��n)�錧(d��o)ͨ���@�M��������_(d��)������ֵimax���ұ��ֺ㶨���t늙C(j��)�Ķ��D(zhu��n)�D(zhu��n)�ؾ��Ա�ʾ�飺
������(d��o)ͨ��
������(d��o)ͨ��
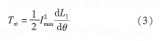
���Ќ�(d��o)ͨ��늸О飺l1=��imax���ȣ���l2=(imax,�ȡ�30��)����D3��ʾ��
�����������֪����ijһ����ز���imax�£������D(zhu��n)�ӵ�����λ�ò�ͬ�����_�P(gu��n)�ܵČ�(d��o)ͨҎ(gu��)��Ҳ����ͬ���������ࣩ����(d��o)��dl/d�Ȳ���ͬ���@��ֱ��Ӱ�tst�Ĵ�С�����⣬��(d��ng)���D(zhu��n)�ӵ�����λ��һ���r(sh��)��������ͬF(xi��n)����ô��tst�c����ز���imax��ƽ�������ȡ�
2�{(di��o)�ٿ��Ʒ���
�_�P(gu��n)����늙C(j��)�{(di��o)�ٲ����^���`����Է֞������
(1)�Ƕ�λ�ÿ���ģʽ(���Qapc)���Ƕ�λ�ÿ��Ʒ�ʽ���ǿ������_�P(gu��n)�_ͨ�Ǧ�1���P(gu��n)��Ǧ�2����׃���_�P(gu��n)���|�l(f��)��(d��o)ͨ�r(sh��)�g���Ķ��{(di��o)��(ji��)��������Σ��_(d��)���{(di��o)��늙C(j��)��늴��D(zhu��n)��Ŀ�ġ��_�P(gu��n)����늙C(j��)�ڸ��م^(q��)���^�m��apc��ʽ��apc�Ŀ������^����`���ԣ���Ŀǰ��(y��ng)������һ�N���Ʒ�ʽ��
(2)����ز�����ģʽ(���Qccc)���_�P(gu��n)����늙C(j��)�ڵ��ٹ����e�����ӕr(sh��)����늄ӄ� |