����ģ��pi���Ƶ�����ͬ��ֱ��늙C
ʸ������ϵ�y�о�
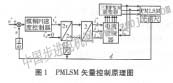
���d�F���O���������
���m��������W늚���c��Ϣ���̌WԺ���m��730050��
ժҪ������ģ�������c���y��pid���g��Y�ϣ��OӋ�����Ԍ��Fpi�������{����ģ��pi��������������y��pi�ٶȿ�����������matlab/simd/nk������ͬ��ֱ��늙C����ʸ������ϵ�y��ģ�����档����͌��Y������������ģ��pi���ƾ��и��õĄӑB푑����ܣ�����Ч�����ƕ��B�ͷ��B�µ������}�ӣ�����ؓ�d�_�Ӿ����^���������ԡ�
�P�I�~������ͬ��ֱ��늙C��ʸ�����ƣ�ģ��pi����
�ЈD���̖��tm351��tm341; tm359.4 �īI��־�a��a ���¾�̖��
0�� ��
����ͬ��ֱ��늙C���������ӑB���ܡ���λ���ȷ��������ֱ��늙C���߃�Խ�ԣ����pmlsmԽ��Խ�������ֱ���ŷ�ϵ�y��[1-2]������������ͬ��ֱ��늙C���څ����z�ӡ�ؓ�d�_�ӵȆ��}����ˣ����Â��ypi�ٶȿ�������ʸ������ϵ�y���y�M��߾����ŷ�ϵ�y��Ҫ���IJ��ôň�������ƣ���ģ�������c���y��pid���g��Y�ϣ��OӋ�����Ԍ��Fpi�������{����ģ��pi��������������matlab/simulink������늙C�Ϳ���ϵ�y�ķ���ģ�͡���ԓϵ�y�M�з��棬�@�������õĿ������ܣ��錍�F�����ܵ�ֱ���ŷ�ϵ�y�춨�˻��A��
1 pmlsm�Ĕ��Wģ��
�麆�������������¼��O��
�ٺ����Fоͼ��ضȌ�늙C������Ӱ푣�
�ڲ�Ӌ�u���p�ĺʹŜ��p�ģ�
�۲����]߅��Ч����
�ܲ����]�ضȵ����،����Ų��ϵ�Ӱ푣��J�������w�ň��㶨��
�����īI���ƌ�������ͬ��ֱ��늙C��d-q����ϵ�µ�늉��ʹ�朷��̣��䷽�̷քe�飺
늉����̣�
ʽ��d����q��d��g�S��朣�ld��lq��d��q�S늸У���i�������w��Ч��朣�r��ÿ���@�M��裻m������ͬ��ֱ��늙Cƽ���ٶ�����ɵ����D늙C���ٶȣ�w=(��/��)v��v��ƽ���ٶȣ��Ӟ�ŘO���ľࣻ
��ʽ(1)���Ɍ������������̞飺
늙C�ęCе�\�ӷ��̞飺
ʽ�У�fe��늴�������fl��ؓ�d������bv��ճ��Ħ��ϵ����m���\�Ӳ����|����m=mr+ml��mr����ӵ��|����ml����ӎ��ӵ�ؓ�d�|����
��ʽ(1) -ʽ(4)����������ͬ��ֱ��늙Cd-q����ϵ�µ�늙Cģ�͡�
2 pmlsm�Ĵň�����ʸ������
��ʽ(3)��֪����ͬ��늙C�������cq��������ȡ����˵õ����Է��̼��a������Ч������������id�����o�Ĵň�������Ʒ�ʽ���tʽ(3)׃�飺
�˕r�������H�c����q�S����Ĵ�С���P��ֻҪͨ�^���������μ�λ�ã�d�S���y����ʹ�����������ĺϳ�ʸ��λ��q�S���@�͌��F��늙C�Ľ��id�����0�r��pmlsmʸ������ԭ��D��D1��ʾ���D��v��o���ٶȣ����ٶȷ�����������֮��ݔ���ٶȿ��������Ϳ��Եõ����S����o��#����ͨ�^����׃�Q�õ���������o��ia��ib��ic����������ͬ��ֱ��늙C�����y���B�ӣ���ˣ�ֻҪ��������������ɣ���һ���������������֮�͞�����_������ϵ��ֻ������ia��ib�M����������������������ͨ�^������h���Ʒ�ʽ�õ�������̖��
3ģ��pi���������OӋ
|