╗∙ė┌Ę┤ļŖä▌×V▓©ĘĮĘ©Ą─¤oé„ĖąŲ„bldcm┐žųŲ
Åł╩ńŲGŻ¼═§ąąė▐Ż¼ę”Ģį¢|
Ż©╚A¢|└Ē╣ż┤¾īWą┼Žó┐ŲīW┼c╣ż│╠īWį║Ż¼╔Ž║Ż200237Ż®
š¬ę¬Ż║─┐Ū░æ¬ė├ė┌¤oé„ĖąŲ„bldcmĄ─┐žųŲĘĮĘ©Č╝╩Ū▓╔ė├╬╗ų├Öz£yļŖ┬Ę─®ķgĮė½@Ą├▐Dūė╬╗ų├ą┼ŽóŻ¼īŹ¼Fī”bldcmĄ─┐žųŲĪŻįō╬─╠ß│÷ę╗ĘN┐╔ęį╩ĪĄ¶╬╗ų├Öz£yļŖ┬ĘĄ─╗∙ė┌Ę┤ļŖä▌×V▓©Ą─ĘĮĘ©Ż¼┐╔ęį£╩┤_½@Ą├Ę┤ļŖä▌▀^┴Ń³cŻ¼“īäėbldcmŲĮĘĆ▀\ąąĪŻ╗∙ė┌tms320lf2407aĄ─┐žųŲŲĮ┼_▀MąąīŹ“ׯ¼ĮY╣¹ūC├„┴╦įōĘĮĘ©Ą─ėąą¦ąįĪŻ
ĻPµIį~Ż║Ę┤ļŖäėä▌×V▓©Ż╗¤o╦óų▒┴„ļŖÖCŻ╗¤oé„ĖąŲ„┐žųŲŻ╗öĄūųą┼╠¢╠Ä└ĒŲ„( dsp)
ųąłDĘųŅÉ╠¢Ż║tm36 +1 ╬─½Iś╦ųŠ┤aŻ║a ╬─š┬ŠÄ╠¢Ż║1001-6848( 2010)05-0066-04
0ę²čį
─┐Ū░Ż¼æ¬ė├ė┌¤oé„ĖąŲ„bldcm┐žųŲĄ─ĘĮĘ©║▄ČÓŻ¼╚ńĘ┤ļŖä▌Öz£yĘ©ĪóČ©ūė└@ĮMļŖĖąĘ©Īó╦┘Č╚¤oĻP╬╗ų├║»öĄĘ©Īó╗∙ė┌öUš╣┐©Ā¢┬³×V▓©Ų„(ekf)Ą─ĀŅæBė^£yŲ„Ę©ĪóųŪ─▄╗»┐žųŲĘĮĘ©Ż©─Ż║²┐žųŲĪó╔±ĮøŠWĮj┐žųŲęį╝░ąĪ▓©╔±ĮøŠWĮj┐žųŲĄ╚Ż®Ą╚Ą╚.Ż¼▀@ą®ĘĮĘ©Č╝╩Ūęį╬╗ų├Öz£yļŖ┬Ę×ķ╗∙ĄAĄ─Ż¼▓╗āHį÷╝ė┴╦ļŖ┬ĘĄ─Å═ļsąį║═│╔▒ŠŻ¼ę▓į÷┤¾┴╦┐žųŲ░ÕĄ─¾wĘeŻ¼ę“┤╦▒Š╬─╠ß│÷▓╗ąĶę¬╬╗ų├Öz£yļŖ┬ĘĄ─╗∙ė┌Ę┤ļŖä▌×V▓©Ą─ĘĮĘ©Ż¼ų╗ąĶę¬ÄūéĆļŖūĶīóĘ┤ļŖä▌ą┼╠¢Ž▐ųŲį┌tms320lf2407aąŠŲ¼Ą─ad▓╔śė─ŻēKĄ─╣żū„ļŖē║ĘČć·ā╚ĪŻįōĘĮĘ©ļŖ┬ĘīŹ¼F║åå╬┐╔┐┐Ż¼Č°Ūę─▄ē“½@Ą├£╩┤_Ą─Ę┤ļŖä▌▀^┴Ń³cŻ¼┐╔ęį┤·╠µé„ĮyĄ─╬╗ų├Öz£yļŖ┬Ę½@╚Ī▐Dūė╬╗ų├ą┼ŽóĪŻ
ė╔ė┌Ę┤ļŖä▌ą┼╠¢┼cļŖÖC▐D╦┘Ž╠š²▒╚Ż¼į┌Ą═╦┘║═ņoų╣ŪķørŽ┬Ż¼Ę┤ļŖä▌ą┼╠¢║▄ąĪ╗“š▀ø]ėąŻ¼į┌▀@ĘNŪķørŽ┬šęĄĮ▀^┴Ń³c╩ŪĘŪ│Ż└¦ļyĄ─Ż¼Č°į┌Ė▀╦┘ģ^ė“Ę┤ļŖä▌ą┼╠¢Ę∙ųĄ▌^┤¾Ż¼īżšę▀^┴Ń³cŽÓī”╚▌ęūŻ¼Ą½╩ŪļSų°▐D╦┘Ą─╠ßĖ▀Ż¼ŽÓ╬╗čė▀tę▓Ģ■įĮüĒįĮ┤¾Ż¼ę“┤╦ĮoōQŽÓĢr┐╠Ą─┤_ȩĦüĒ└¦ļy[46]Ż¼▒Š╬─īóįö╝Üėæšōęį╔Žā╔éĆå¢Ņ}Ż¼▓óĮo│÷╗∙ė┌Ę┤ļŖä▌×V▓©ĘĮĘ©Ą─¤oé„ĖąŲ„bldcm┐žųŲīŹ“×ĮY╣¹ĪŻ
1Ę┤ļŖä▌×V▓©┐žųŲĘĮĘ©Ė┼╩÷
Ę┤ļŖä▌Öz£y┐žųŲĘ©Ą─╗∙▒ŠįŁ└Ē╩Ūį┌║÷┬įė└┤┼¤o╦óų▒┴„ļŖäėÖCļŖśąĘ┤æ¬ė░ĒæĄ─Ū░╠ߎ┬Ż¼═©▀^Öz£yĪ░öÓķ_ŽÓĪ▒Ą─Ę┤ļŖä▌▀^┴Ń³cŻ¼░┤ššę╗Č©ęÄätū„▀m«öčė▀t║¾Ą├ĄĮ╣”┬╩Ų„╝■š²┤_ė|░lĢr┐╠Ż¼į┘░┤ššļŖÖCĄ─▀\▐DĘĮŽ“ęįę╗Č©┤╬ą“üĒ▌å┴„ė|░l┴∙éĆ╣”┬╩╣▄Ż¼╝┤┐╔īŹ¼Fī”¤oé„ĖąŲ„bldcmĄ─┐žųŲĪŻė╔┤╦┐╔ęŖŻ¼╚ń║╬Įo│÷ę╗éĆ┐╔Š½┤_ūRäe▀^┴Ń³cĄ─╦ŃĘ©Ż¼Å─Č°╣└ėŗ▐Dūė╬╗ų├Ż¼╩╣ļŖÖC└@ĮMį┌š²┤_Ą─Ģrķg▀MąąōQŽÓ╩ŪīŹ¼Fbldcm┐žųŲĄ─ĻPµIĪŻ
ęį═∙Ą─Ę┤ļŖä▌▀^┴Ń³cÖz£yČ╝╩Ū═©▀^╬╗ų├Öz£yļŖ┬ĘüĒīŹ¼FĄ─Ż¼ę╗░Ńė╔Ė¶ļxĪó×V▓©║═▒╚▌^╚²éĆŁh╣Øśŗ│╔Ż¼╬╗ų├Öz£yļŖ┬ĘĄ├ĄĮĄ─Ę┤ļŖä▌ą┼╠¢╦═╚╦dspĄ─▓Č½@ę²─_Ż¼Ė∙ō■ę╗Č©Ą─ęÄät«a╔·ōQŽ“ą┼╠¢Ż¼┐žųŲ╣”┬╩╣▄Ą─ī¦═©┼cĻPöÓŻ¼“īäėļŖÖC▀\ąąĪŻ
į┌īŹļHŪķørŽ┬Ż¼į┌öÓķ_ģ^ķgČ╬Ę┤ļŖä▌┤µį┌ęįŽ┬įļ┬ĢŻ║ę╗╩Ū±Ņ║ŽüĒūįī¦═©ģ^ķgČ╬Ą─įļ┬ĢŻ¼Č■╩Ū└@ĮMĄ─pwm“īäėą┼╠¢±Ņ║ŽĄĮ└@ĮMĄ─bemfą┼╠¢╔ŽĪŻ▀@ą®įļ┬ĢĢ■╩╣╬╗ų├Öz£yą┼╠¢│÷ÕeŻ¼ī¦ų┬ļŖÖC¤oĘ©š²│Ż▀\▐DĪŻę“┤╦Ż¼ąĶę¬īżšęę╗ĘNėąą¦Ą─ĘĮĘ©üĒ½@╚Ī┐╔┐┐Ą─Ę┤ļŖä▌▀^┴Ń³cĪŻ
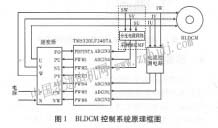
▒Š╬─╠ß│÷Ą─╗∙ė┌Ę┤ļŖä▌×V▓©Ą─▀^┴Ń³cÖz£yĘĮĘ©Ż¼╩ĪĄ¶┴╦╬╗ų├Öz£yļŖ┬ĘŻ¼ų▒ĮėīóĘųē║║¾Ą─Ę┤ļŖä▌ą┼╠¢╦═╚╦dspąŠŲ¼adcČ╦┐┌Ż¼╚╗║¾ī”Ę┤ļŖä▌ą┼╠¢▀Mąą▓╔śėŻ¼ļS║¾═©▀^▄ø╝■×V▓©Ą─ĘĮĘ©ī”Ę┤ļŖä▌ą┼╠¢▀Mąą╠Ä└ĒŻ¼½@╚Ī£╩┤_Ą─Ę┤ļŖä▌▀^┴Ń³cŻ¼į┘ī”Ųõ▀Mąą▀m«öĄ─×V▓©čė▀tčaāöŻ¼ūŅĮKĄ├ĄĮš²┤_Ą─ōQŽ“Ģr┐╠Ż¼īŹ¼F¤oé„ĖąŲ„bldcmĄ─┐žųŲĪŻ╗∙ė┌dspfms320lf2407aŲĮ┼_Ą─Ę┤ļŖä▌×V▓©ĘĮĘ©Ą─¤oé„ĖąŲ„bldcm┐žųŲŽĄĮyĄ─įŁ└Ē┐“łD╚ńłD1╦∙╩ŠĪŻ
ļŖÖCĄ═╦┘║═Ė▀╦┘ĢrĘ┤ļŖä▌Ą─╠žš„▓Ņäe▌^┤¾Ż¼ę“┤╦Ę┤ļŖä▌×V▓©┐žųŲĘĮĘ©▓╗═¼Ż¼Ž┬├µŠ▀¾wĮķĮBĄ═╦┘ģ^ķgĘ┤ļŖä▌×V▓©┐žųŲĘĮĘ©║═Ė▀╦┘ģ^ķgĄ─Ę┤ļŖä▌×V▓©┐žųŲĘĮĘ©ĪŻ
2Ą═╦┘ģ^ķgĄ─Ę┤ļŖä▌×V▓©┐žųŲĘĮĘ©
ė╔ė┌Ą═╦┘ģ^ķgĄ─Ę┤ļŖä▌Ę∙ųĄ▌^ąĪŻ¼ę“┤╦─│ę╗ŽÓöÓķ_ģ^ķgĄ─Ę┤ļŖä▌ą┼╠¢Ą─ą▒┬╩ę▓▒╚▌^ąĪŻ¼į┘╝ė╔ŽĖ„ĘNįļ┬Ģī”╦³Ą─ė░ĒæŻ¼╩╣Ą├į┌öÓķ_ģ^ķgÖz£yĄĮ╠ō╝┘▀^┴Ń³cą┼╠¢Ą─Ė┼┬╩▌^┤¾ĪŻ
ßśī”▀@ĘNŪķørŻ¼▒Š╬─▓╔╚ĪĄ─ĘĮĘ©╩ŪŻ║ī”u(a)Īóv(b)Īów(c)╚²ŽÓ═¼Ģr▀Mąą▀B└m▓╔śėŻ¼½@Ą├▀@╚²éĆ▓╔śėĮY╣¹ų«║¾Ż¼īóĢ■«a╔·ę╗éĆadcųąöÓŻ¼╚╗║¾▀@ą®▓╔śė▒╗╦═ų┴╚²éĆŽÓ═¼Ą─iir×V▓©Ų„Ż¼«a╔·╚²éĆ×V▓©▓╔śėŻ¼īóįō▓╔śėųĄ┼c▀^┴ŃķōųĄ▀Mąą▒╚▌^üĒ┤_Č©▀^┴Ń³cĪŻ
Ųõųątimerlė├ė┌£y┴┐Å─ę╗éĆ▀^┴Ń³cĄĮŽ┬ę╗éĆ▀^┴Ń³c╦∙ |