����ģ�����m��adrc�ğoˢֱ��늙C�������
��(qu��n)�|��ȫ��
�����K��W늚���Ϣ���̌WԺ���(zh��n)��212013��
ժҪ��ᘌ����y(t��ng)pid�����oˢֱ��늙C����}���^���D(zhu��n)���}���@���Ć��}�����о�늙C��(sh��)�Wģ�ͺ��Կ��_������ԭ�����A�ϣ����һ�N����ģ�����m��adrc�ğoˢֱ��늙C���������������ģ������������adrc����(sh��)�ھ�����������늙C����}�ӵ�ҕ��ϵ�y(t��ng)��δ֪�ɔ_������ԓ���OӋ�Ŀ������Ը������������Σ�����늙C�D(zhu��n)���}�ӡ����Y(ji��)����C����������Ʒ�������Ч�ԣ���һ�N���͵ğoˢֱ��늙C������Ʒ�ʽ��
�P(gu��n)�I�~���oˢֱ��늙C�������ģ�����m�����Կ��_������
�ЈD���̖��tm36 +1; tm273+ 2 �īI��־�a��a ���¾�̖��1001-6848(2010)0i-0073-04
0����
�oˢֱ��늙C��һ����׃���Ǿ���ϵ�y(t��ng)������늘з����ķǾ��ԡ��Q���m(x��)���ȶ��ԭ��������}�ӱ��^���@�����H�����У��y�Եõ����뷽����������������ھ����^�ߵ��ŷ�ϵ�y(t��ng)�Б��á����y(t��ng)pid����ֱ���xȡ�`�����������̖������푑��������c���{(di��o)��ì�ܵij��F(xi��n)�����䱾�����е�����Ч������Ҫ��늄ݡ����ͬ����Ƶğoˢֱ��늙C���Ʋ�����ᘌ��@һ���}����(j��ng)�W(w��ng)�j�������~�������A�y���Ƽ����h(hu��n)���Ƶȱ����ڟoˢֱ��늙C�����Ը���늙C�\�����ܣ���ȡ����һ����Ч����
�Կ��_������( adrc)�ɸ�ۙ����(td)���̣��U����B(t��i)�^�y��(eso)���̣��Ǿ��Ԡ�B(t��i)�`���( nlsef)���̽M�ɡ�ԓ���������Ԅәz�yϵ�y(t��ng)ģ�͵Č��r���ò������a�������ƌ���(sh��)�l(f��)��׃�����������_���_�ӕr���ܵõ��ܺõĿ���Ч���������^�����m���Ժ������ԣ����ѳɹ�������һЩϵ�y(t��ng)�Ŀ��ơ�ᘌ�adrc�Ǿ��Է�������(sh��)�����ھ������������}���Y(ji��)��ģ�������cad-rc�ă�(y��u)�ݣ������о���һ�N����ģ�����m��ad-rc���Ʋ��ԣ������䑪���ڟoˢֱ��늙C����{(di��o)��(ji��)�����OӋ���������ϵ�y(t��ng)�����ԣ��_���pС����}�ӵ�Ŀ�ġ����Խ��әC���ƽ�_���M���ˌ���о������Y(ji��)�������C��ԓ���Ʒ�����Ч�ԣ����^�õظ������������Σ�����늴��D(zhu��n)���}�ӡ�
1 �oˢֱ��늙C��(sh��)�Wģ��
�о������B�ӵı��Nʽ�[�O�oˢֱ��늙C�����˺����������������¼��O��
�ٶ����@�M�����������@�M��
�ڲ����]�X��Ч���ʹ�·ͣ�
�ۺ��ԴŜ����u�������wЧ���͜ضȌ�����(sh��)��Ӱ푣�
�����ඨ���@�M���Q��
�oˢֱ��늙C늉�ƽ�ⷽ��ʽ��
늴��D(zhu��n)�ط��̣�
�Cе�\�ӷ��̣�
2 �Կ��_����ԭ��
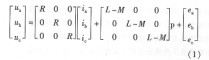
�Կ��_������( adrc)���ڌ���(j��ng)��pid�������M�з�˼�������һ�N�ĸ��M�ͷǾ���pid�������Y(ji��)��(g��u)���ɸ�ۙ����(td)���U����B(t��i)�^�y��(eso)���Ǿ��Ԡ�B(t��i)�`���( nlsef)�����������ֽM�ɡ��Զ��A�ܿ،��������adrc�Y(ji��)��(g��u)��Dl��ʾ��
���Atd�����^���^�̲���ȡ����A����̖��������ݔ��a(ch��n)��2��ݔ����̖���Ǹ���(j��)���������c������Ҫ���ŵĹ⻬�^���^�̵Ľ����֡�
���Aeso�ɱ��،����ݔ��y(t)����Ӌ����Ġ�B(t��i)׃���͌��_�ӵČ��r��������ϵ�y(t��ng)ģ�ͺ���_�ӵĹ�Ӌ�����`�(j��ng)�Ǿ��ԽM�ϣ��õ�ݔ����
�Կ��_���������Ԅәz�yϵ�y(t��ng)ģ�͵Č��r���ò������a�������ƌ���(sh��)�l(f��)��׃�����������_���_�ӕr���ܵõ��ܺõÿ���Ч�����������m���Ժ��������^�á�
3ģ�����m��adrc�OӋ
adrc���ƅ���(sh��)�ĺ����xȡ����������ܾ����^���Ӱ푡����У��Ǿ��Է�������ϵ��(sh��)p1�c������u��������Ҫ�����OӋ |