╗∙ė┌ČÓ─ŻųŪ─▄ģfš{┐žųŲĄ─Ė▀ąį─▄Į╗┴„╦┼Ę■ŽĄĮy
į°ė±ĮŻ¼▒RąĪ├Ę
Ż©š┐ĮŁÄ¤ĘČīWį║š┐ĮŁ524048Ż®
š¬ę¬Ż║Ė∙ō■Į╗┴„╦┼Ę■ŽĄĮyĖ▀ąį─▄Ą─ę¬Ū¾Ż¼įOėŗ┴╦ę╗ĘN╗∙ė┌ČÓ─ŻųŪ─▄ģfš{┐žųŲĄ─Į╗┴„╦┼Ę■ŽĄĮyĪŻīŹ“×ĮY╣¹▒Ē├„Ż║įō┐žųŲĘĮĘ©Ēææ¬┐ņĪó¶ö░¶ąįÅŖŻ¼ŽĄĮyŠ▀ėą▌^║├Ą─äėĪóņoæBąį─▄║═┐╣Ė╔ö_─▄┴”ĪŻ
ĻPµIį~Ż║─Ż║²┐žųŲŻ╗╔±Įø┐žųŲŻ╗Į╗┴„╦┼Ę■ŽĄĮyŻ╗ČÓ─ŻųŪ─▄ģfš{┐žųŲ
ųąłDĘųŅÉ╠¢Ż║tp273 +.4 ╬─½Iś╦ųŠ┤aŻ║a ╬─š┬ŠÄ╠¢Ż║1001-6848(2010)05-0077-03
0ę² čį
Į╗┴„╦┼Ę■ŽĄĮyė╔Į╗┴„ļŖäėÖCĮM│╔Ż¼ŲõöĄīW─Żą═Š▀ėąĘŪŠĆąįĪó±Ņ║ŽĪóĢrūāĄ─╠ž³cŻ¼┐žųŲ▓▀┬į▒╚▌^Å═ļsŻ¼Į╗┴„é„äėŽĄĮyĄ─š{╦┘ąį─▄┼c╦³╦∙▓╔ė├Ą─┐žųŲ▓▀┬įėąų°ų▒ĮėĄ─ĻPŽĄŻ¼├┐ę╗ĘN┐žųŲ▓▀┬įČ╝ėąŲõ╠žķLŻ¼Ą½ėųČ╝╗“ČÓ╗“╔┘į┌─│ą®ĘĮ├µ┤µį┌ę╗ą®å¢Ņ}Ż¼ę“┤╦Ż¼Ė„ĘN┐žųŲ▓▀┬į欫ö╗źŽÓØB═ĖŻ¼╚ĪķLčaČ╠Ż¼ĮY║Žą╬│╔Å═║Ž┐žųŲ▓▀┬įŻ¼ęįĖ³║├Ąž╠ßĖ▀┐žųŲąį─▄ĪŻ▒Š╬─╠ß│÷┴╦ę╗ĘNČÓ─ŻųŪ─▄ģfš{┐žųŲ▓▀┬įŻ¼╦³─▄ŠC║ŽĖ„ĘN┐žųŲĘĮĘ©Ą─ā׳cŻ¼▓óįOėŗ┴╦ę╗ĘN╗∙ė┌ČÓ─ŻųŪ─▄ģfš{┐žųŲĄ─Į╗┴„╦┼Ę■ŽĄĮyŻ¼═¼│ŻęÄūāĮYśŗ┐žųŲŻ©ŪąōQ┐žųŲŻ®ŽÓ▒╚Ż¼╦³░čŪ░š▀Ą─³cŪąōQĖ─×ķŽÓī”ŲĮ╗¼Ą─ųŪ─▄ŪąōQŻ¼┤¾┤¾╠ßĖ▀┴╦╦┼Ę■┐žųŲĄ─äėĪóņoæBąį─▄Ż¼╚ĪĄ├┴╦ØMęŌĄ─ą¦╣¹Ż¼▓óŪę¤oąĶę└┘ćŠ½┤_Ą─öĄīW─Żą═Ż¼×ķĮŌøQ╚ń║╬┐žųŲ┤µį┌ĘŪŠĆąį║═▓╗┤_Č©ąįĄ─Į╗┴„╦┼Ę■ŽĄĮy╠ß│÷┴╦ę╗ĘNŪąīŹ┐╔ąąĄ─ĘĮ░ĖĪŻ
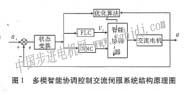
l ČÓ─ŻųŪ─▄ģfš{┐žųŲĄ─Į╗┴„╦┼Ę■ŽĄĮy
╗∙ė┌rbfā×╗»Ą──Ż║²╔±Įø╗ņ║Žģfš{┐žųŲĮ╗┴„╦┼Ę■ŽĄĮyĄ─ĮYśŗ╚ńłDl╦∙╩ŠŻ¼╗∙ė┌rbfā×╗»Ą──Ż║²å╬╔±Įøį¬╗ņ║Žģfš{┐žųŲŲ„ė╔┤ųš{─Ż║²┐žųŲŲ„flcĪó╝Üš{å╬╔±Įøį¬ŠWĮj┐žųŲŲ„nnc║═rbfā×╗»ģfš{Ų„Ą╚╚²éĆų„ę¬▓┐Ęų╦∙ĮM│╔ĪŻ
1.1┤ųš{─Ż║²┐žųŲŲ„flc
«ö╬╗ų├š`▓Ņ▌^┤¾ĢrŻ¼╬ęéā░čš`▓ŅĪóš`▓Ņūā╗»┬╩║═╦┘Č╚ĮoČ©┴┐╗»┐éĄ╚╝ēĪŻ▓╔ė├š{š¹ę“ūėĄ──Ż║²┐žųŲ▒Ē▀_╩Į×ķŻ║
▒Ē╩Šī”ŲõųąöĄō■░┤Ž┬├µįŁät▀Mąą▀\╦ŃŻ║
im(x)▒Ē╩Šī”z╚Īš¹ĪŻ«ö╬╗ų├š`▓Ņ▌^┤¾ĢrŻ¼╚ĪĄ├┤¾ą®Ż¼▒Ē╩Šī”š`▓ŅeĄ─╝ėÖÓųĄ┤¾Ż¼┐žųŲĄ─ų„ę¬─┐Ą─╩ŪŽ¹│²š`▓ŅŻ╗Č°«ö╬╗ų├š`▓Ņ▌^ąĪĢrŻ¼Ė³ų„ꬥ─┐žųŲ─┐Ą─╩Ū╩╣ŽĄĮy▒M┐ņĘĆČ©Ż¼£╩┤_Č©╬╗Č°¤o│¼š{╗“ąĪ│¼š{Ż¼ę“┤╦╩╣š`▓Ņūā╗»┬╩eĄ─╝ėÖÓ┤¾ą®Ż¼╝┤╚ĪųĄąĪą®ĪŻßśī”▓╗═¼Ą─š`▓ŅĄ╚╝ēĘČć·Ż¼Ęųäe╚ĪvųĄ×ķŻ║
īó╔Ž╩Įė├üĒīŹ¼FflcĄ──Ż║²═Ų└ĒŻ¼╚ńłD2╦∙╩ŠŻ¼╦³─▄╝ė┐ņŽĄĮyĄ─Ēææ¬╦┘Č╚ĪŻ
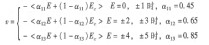
1.2å╬╔±Įøį¬┐žųŲŲ„nnc
«öš`▓Ņe▌^┤¾ĢrŻ¼▓╔ė├å╬╔±Įøį¬┐žųŲŲ„Ģ■╩╣ŲõÖÓųĄĢ■ūāĄ├║▄┤¾Ż¼╔§ų┴Ģ■į┌ėŗ╦Ńųąęń│÷Ż¼ė░Ēæ┐žųŲą¦╣¹Ż¼Č°Ūęė╔ė┌╔±Įøį¬ąĶę¬▓╗öÓīW┴ĢĪóš{š¹ÖÓųĄŻ¼ŲõĒææ¬▀^│╠▓╗╚ń─Ż║²┐žųŲ┐ņŻ¼Č°į┌š`▓Ņ▌^ąĪĢr╔±Įøį¬┐žųŲŲ„Š▀ėąĘĆæBŠ½Č╚Ė▀Īó¶ö░¶ąįÅŖĄ─ā׳cĪŻę“┤╦Ż¼š`▓Ņ▌^ąĪĢr┐╔ęį▓╔╚Īå╬╔±Įøį¬┐žųŲĪŻå╬╔±Įøį¬ĮYśŗ╚ńłD3╦∙╩ŠĪŻ
▓╔╚ĪĄ─┐žųŲ▓▀┬į×ķŻ║
╩ĮųąŻ¼umax×ķŽ▐Ę∙ųĄŻ¼ė╔ė┌x1Īóx2,Īóx3Ęųäe×ķš`▓ŅĪóš`▓Ņ╬óĘųĪóš`▓ŅĘeĘųŻ¼ė├īW┴ĢęÄätš{š¹Ė„▌ö╚ļ┴┐Ą─ÖÓųĄŻ¼å╬éĆ╔±Įøį¬Š═ŽÓ«öė┌ūāŽĄöĄĄ─ūį▀mæ¬pidš{╣ØŲ„Ż¼ę“┤╦╦³╝╚ėąūį▀mæ¬─▄┴”Ż¼ėųŠ▀éõé„Įypid┐žųŲŲ„Ą─ā׳cĪŻŪę╩╣ŽĄĮyĄ─äėæBąį─▄ų╗ę└┘ćė┌Ųõš`▓Ņą┼╠¢Ż¼Č°▓╗╩▄╗“╔┘╩▄ī”Ž¾─Żą═╚■öĄĄ─ė░ĒæŻ¼Å─Č°╠ßĖ▀ŽĄĮyĄ─¶ö░¶ąįĪŻ
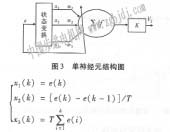
1.3ųŪ─▄ģfš{Ų„rbfc
rbfŠWĮjųąĄ─ū„ė├║»öĄ╩ŪĖ▀╦╣╗∙║»öĄŻ¼╩ŪŠų▓┐Ą─Ż¼ę“Č°╩ŪŠų▓┐▒ŲĮ³Ą─╔±ĮøŠWĮjŻ¼Š▀ėąīW┴Ģ╦┘Č╚┐ņĄ─ā׳cŻ¼▀m║Žė┌╦┼Ę■ŽĄĮy┼╬┐ņ╦┘ąįę¬Ū¾Ż¼╣╩▒Š╬─▓╔ė├╗∙ė┌rbfŠWĮjĄ─ģfš{Ų„rbfcüĒīŹ¼FČÓ┐žųŲŲ„ģfš{┐žųŲŻ¼rbfcĄ─ĮYśŗ╚ńłD4╦∙╩ŠĪŻ
|