╗∙ė┌dspĄ─¤o╦óų▒┴„ļŖäė(d©░ng)ÖC(j©®)┐žųŲŽĄĮy(t©»ng)įO(sh©©)ėŗ(j©¼)
Ų▌∙i
Ż©░▓╗šĮ©ų■╣żśI(y©©)īW(xu©”)į║ļŖūė┼cą┼Žó╣ż│╠īW(xu©”)į║Ż¼░▓╗š230601Ż®
š¬ę¬Ż║╠ß│÷▓óįO(sh©©)ėŗ(j©¼)┴╦ęįtms320f2812×ķ║╦ą─Ą─¤o╦óų▒┴„ļŖäė(d©░ng)ÖC(j©®)š{(di©żo)╦┘ŽĄĮy(t©»ng)įO(sh©©)ėŗ(j©¼)┼cīŹ(sh©¬)¼F(xi©żn)ĘĮ░ĖŻ¼▓óįO(sh©©)ėŗ(j©¼)┴╦ūįš¹Č©─Ż║²┐žųŲŲ„īŹ(sh©¬)¼F(xi©żn)¤o╦óų▒┴„ļŖÖC(j©®)Ą─š{(di©żo)╦┘Ż¼Įo│÷┴╦īŹ(sh©¬)“×(y©żn)ĮY(ji©”)╣¹║═ĮY(ji©”)šōĪŻįōĘĮĘ©▌^ų«é„Įy(t©»ng)Ą─š{(di©żo)╦┘┐žųŲĘĮĘ©Ż¼┐╔ęį╠ßĖ▀┐žųŲŠ½Č╚Ż¼ėų─▄ē“Ė∙ō■(j©┤)ī”(du©¼)Ž¾▌ö│÷Ą─ūā╗»š{(di©żo)š¹ģóöĄ(sh©┤)ĪŻīŹ(sh©¬)“×(y©żn)ĮY(ji©”)╣¹▒Ē├„Ż¼įōŽĄĮy(t©»ng)Š▀ėąā×(y©Łu)┴╝Ą─┐žųŲą¦╣¹ĪŻ
ĻP(gu©Īn)µIį~Ż║tms320f2812Ż╗ūįš¹Č©─Ż║²┐žųŲŻ╗¤o╦óų▒┴„ļŖäė(d©░ng)ÖC(j©®)Ż╗š{(di©żo)╦┘ŽĄĮy(t©»ng)
ųąłDĘųŅÉ╠¢(h©żo)Ż║tm36 +1 ╬─½I(xi©żn)ś╦(bi©Īo)ųŠ┤aŻ║a ╬─š┬ŠÄ╠¢(h©żo)Ż║1001-6848(2010)05-0103-03
0ę² čį
¤o└¹ų▒┴„ļŖÖC(j©®)▓╗āHŠ▀ėąĮ╗┴„ļŖÖC(j©®)Ą─¾wĘeąĪĪóųž┴┐▌pĪóæT┴┐ąĪĄ╚╠ž³c(di©Żn)Ż¼Č°ŪęōĒėąų▒┴„ļŖäė(d©░ng)ÖC(j©®)ā×(y©Łu)┴╝Ą─š{(di©żo)╦┘ąį─▄Ż¼Ą½ėųø]ėąÖC(j©®)ąĄōQŽ“Ų„Ą─╚▒³c(di©Żn)Ż¼ę“┤╦ų„ę¬æ¬(y©®ng)ė├ė┌╣żÅSūį╗»║═▐k╣½ūįäė(d©░ng)╗»ĘĮā╔Ż¼╦³š²į┌čĖ╦┘╚Ī┤·é„Įy(t©»ng)Ą─ų▒┴„ļŖÖC(j©®)║═«É▓ĮļŖÖC(j©®)Ż¼į┌Ė▀Š½Č╚Ą─öĄ(sh©┤)┐žįO(sh©©)éõ╚ńÖC(j©®)Ų„╚╦║═ÖC(j©®)ąĄ╩ųĄ─“ī(q©▒)äė(d©░ng)ųąŻ¼¤o╦óų▒┴„ļŖÖC(j©®)Ą─æ¬(y©®ng)ė├ę▓ŽÓ«ö(d©Īng)ČÓĪŻę“┤╦¤o╦óų▒┴„ļŖÖC(j©®)Ą─┐žųŲå¢Ņ}│╔×ķ蹊┐Ą─ųž³c(di©Żn)ĪŻ
ļŖÖC(j©®)š{(di©żo)╦┘ŽĄĮy(t©»ng)ūŅ│Żė├Ą─ĘĮĘ©╩Ūļpķ]Łh(hu©ón)pid┐žųŲŲ„Ż¼Ą½įōĘĮĘ©┤µį┌ģóöĄ(sh©┤)▓╗─▄ļSų°▒╗┐žī”(du©¼)Ž¾Ą─ūā╗»Č°ū„ŽÓæ¬(y©®ng)Ą─š{(di©żo)╦┘Ą─╚▒³c(di©Żn)Ż¼īó─Ż║²┐žųŲ║═pid┐žųŲ╝»║ŽŲüĒę²╚ļš{(di©żo)╦┘ŽĄĮy(t©»ng)┐╔ęį░čę╗ą®Š▀ėą─Ż║²ąįĄ─│╔╩ņĮø(j©®ng)“×(y©żn)║═ęÄ(gu©®)ätėąÖC(j©®)Ą─╚┌╚ļĄĮ┐žųŲ▓▀┬įųąŻ¼Š▀ėą▌^ÅŖ(qi©óng)Ą─¶ö░¶ąįĪŻĄ½▓╔╚Ī─Ż║²┐žųŲ╚į╚╗┤µį┌ę╗╩┬īŹ(sh©¬)╔ŽĄ─│¼š{(di©żo)¼F(xi©żn)Ž¾Ż¼ī”(du©¼)ŽĄĮy(t©»ng)ųąĄ─▓╗┤_Č©ę“╦ž┐žųŲ▓╗╩Ū║▄║├Ż¼ĘĆ(w©¦n)æB(t©żi)Š½Č╚╚į╚╗┐╔ęį╠ßĖ▀ĪŻ▒Š╬─╠ß│÷┴╦ę╗ĘNęįtms320f2812×ķ║╦ą─Ą─¤o╦óų▒┴„ļŖäė(d©░ng)ÖC(j©®)š{(di©żo)╦┘ŽĄĮy(t©»ng)įO(sh©©)ėŗ(j©¼)┼cīŹ(sh©¬)¼F(xi©żn)Ą─ĘĮ░ĖŻ¼▓óø]ėŗ(j©¼)┴╦ūįš¹Č©─Ż║²┐žųŲŲ„īŹ(sh©¬)¼F(xi©żn)¤o╦óų▒┴„ļŖÖC(j©®)š{(di©żo)╦┘Ż¼Įo│÷┴╦īŹ(sh©¬)“×(y©żn)ĮY(ji©”)╣¹║═ĮY(ji©”)šōĪŻ
1Ż«ūįš¹Č©─Ż║²┐žųŲ╝╝ąg(sh©┤)
│ŻęÄ(gu©®)─Ż║²┐žųŲŲ„Š▀ėąĒææ¬(y©®ng)Ģr(sh©¬)ķgČ╠Ż¼│¼š{(di©żo)┴┐ąĪŻ¼¶ö░¶ąį║├Ż¼▀mė┌ĘŪŠĆąįĢr(sh©¬)ūāĄ─Å═(f©┤)ļsŽĄĮy(t©»ng)Ż¼Į©┴ó─Żą═ŽÓī”(du©¼)╚▌ęūĄ╚ā×(y©Łu)³c(di©Żn)Ż¼Ą½═¼Ģr(sh©¬)ę▓▀Ć┤µį┌ę╗ą®å¢Ņ}Ż║╩ūŽ╚Ż¼│ŻęÄ(gu©®)Ą──Ż║²┐žųŲŲ„Ą─┐žųŲęÄ(gu©®)ätĮ©┴óų«║¾Š═╣╠Č©▓╗ūāŻ¼ļyęį½@Ą├****┐žųŲųĖś╦(bi©Īo)ĪŻŽÓī”(du©¼)ė┌ļŖäė(d©░ng)ÖC(j©®)Ųäė(d©░ng)▀^│╠▀@ŅÉÅ═(f©┤)ļsĄ─▒╗┐žī”(du©¼)Ž¾Ż¼▓╔ė├▀@ĘN┐žųŲŲ„▓╗─▄½@Ą├ŅA(y©┤)Ų┌Ą─┐žųŲą¦╣¹Ż¼Č°Ūę▀mæ¬(y©®ng)ŽĄĮy(t©»ng)║═Łh(hu©ón)Š│ūā╗»Ą──▄┴”▓ŅĪŻ
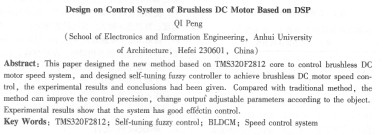
į┌▒Š╬─ųą▓╔ė├ģóöĄ(sh©┤)ūįš¹Č©─Ż║²┐ž╝╝ąg(sh©┤)Ż¼Ė∙ō■(j©┤)Ųäė(d©░ng)▀\(y©┤n)ąą▀^│╠ųąĄ─īŹ(sh©¬)ļHŲ½▓Ņ║═Ų½▓Ņūā╗»┬╩Ą─┤¾ąĪŻ¼┐žųŲŲ„▀x╚Ī▓╗═¼Ą─▒╚└²ę“ūėĪŻ▀@ĘN╗∙ė┌┴┐╗»Īó▒╚└²ę“ūėūįš{(di©żo)š¹ĘĮĘ©╦ŃĘ©║å(ji©Żn)å╬Ė▀ą¦Ż¼┐žųŲą¦╣¹▌^║├ĪŻĮY(ji©”)śŗ(g©░u)┐“łD╚ńłD1╦∙╩ŠĪŻ
─Ż║²┐žųŲŲ„▓╔ė├Č■ŠS─Ż║²┐žųŲŻ¼ų„─Ż║²┐žųŲå╬į¬║═─Ż║²ģóöĄ(sh©┤)īżā×(y©Łu)┐žųŲå╬į¬Č╝ęį¤o╦óļŖäė(d©░ng)ÖC(j©®)Ą─▌ö│÷ļŖ┴„┼cŲ┌═¹ųĄĄ─Ų½▓Ņe╝░Ų½▓Ņūā╗»┬╩ecū„×ķ▌ö╚ļūā┴┐ĪŻ─Ż║²ģóöĄ(sh©┤)īżā×(y©Łu)┐žųŲå╬į¬Ą─▌ö│÷┐╔š{(di©żo)š¹ę“ūėk1Īók2Īók3Ęųäe▒Ē╩Š┴┐╗»ę“ūėkeĪókecęį╝░▒╚└²ę“ūėkaĄ─š{(di©żo)š¹ŽĄĮy(t©»ng)ųĄĪŻeĪóecęį╝░─ŻöM┐žųŲŲ„Ą─▌ö│÷ĪŻĄ─šōė“╚Ī{ -4Ż¼-3Ż¼-2Ż¼-1Ż¼0Ż«+1Ż«+2Ż¼+3Ż¼+4}ĪŻĘų×ķ7éĆ(g©©)─Ż║²ūė╝»Ż¼k1─Ż║²šZčįūā┴┐▀xō±7éĆ(g©©)Ż║nbŻ¼nmŻ¼nsŻ¼zoŻ¼psŻ¼pmŻ¼pbŻ╗ĮŌ─Ż║²╩╣ė├ųžą─Ę©ĪŻ╚ń▒Ē1Ī¬▒Ē4╦∙╩Š
 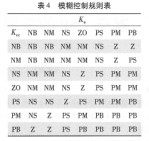 «ö(d©Īng)e║═ÜŌ▌^┤¾Ģr(sh©¬)Ż¼┐sąĪk1║═k2Ż¼ĮĄĄ═ī”(du©¼)┤¾Ų½▓ŅĄ─Ęų▒µ┬╩Ż¼£p╔┘Ų½▓ŅŻ¼┐sČ╠▀^Č╔▀^│╠Ģr(sh©¬)ķgĪŻ«ö(d©Īng)e║═ec▌^ąĪĢr(sh©¬)Ż¼ŽĄĮy(t©»ng)ęčĮėĮ³ĘĆ(w©¦n)æB(t©żi)Ż¼▀@Ģr(sh©¬)æ¬(y©®ng)į÷┤¾k1║═k2Ż¼╠ßĖ▀ŽĄĮy(t©»ng)ī”(du©¼)ąĪŲ½▓ŅĄ─Ęų▒µ┬╩Ż¼╠ßĖ▀┐žųŲĄ─ņ`├¶Č╚Ż╗«ö(d©Īng)š`▓Ņe▌^┤¾Ż¼Ūę┼cš`▓Ņūā╗»ecĘ¹╠¢(h©żo)ŽÓĘ┤Ģr(sh©¬)Ż¼æ¬(y©®ng)▀m«ö(d©Īng)į÷┤¾┐žųŲŲ„Ą─┤¾ąĪĪŻ«ö(d©Īng)š`▓Ņe▌^┤¾Ż¼Ūę┼cš`▓Ņūā╗»ecĘ¹╠¢(h©żo)ŽÓ═¼Ģr(sh©¬)Ż¼æ¬(y©®ng)▀m«ö(d©Īng)£pąĪk3ŽĄĮy(t©»ng)Ēææ¬(y©®ng)į┌ø]Č©ųĄĖĮĮ³Ģr(sh©¬)Ż©┤╦Ģr(sh©¬)š`▓Ņe▌^ąĪŻ®Ż¼×ķĘ└ų╣«a(ch©Żn)╔·▌^┤¾Ą─│¼š{(di©żo)╗“ŪĘš{(di©żo)Ż¼k3æ¬(y©®ng)įōŠ▀ėą▌^īÆĄ─ūā╗»ĘČć·Ż¼▀m«ö(d©Īng)£pąĪ▒╚└²ę“ūėęį£pąĪ│¼š{(di©żo)ĪŻ░┤šš╔Ž╩÷ūįš¹Č©įŁätŻ¼┐╔ęį½@Ą├▌^║├Ą─┐žųŲą¦╣¹ĪŻ
2ŽĄĮy(t©»ng)ė▓╝■įO(sh©©)ėŗ(j©¼)
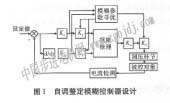
tms320f2812╩Ū32╬╗Ą─┐žųŲīŻė├Īóā╚(n©©i)║¼ķW┤µęį╝░Ė▀▀_(d©ó)150 mipsĄ─öĄ(sh©┤)ūųą┼╠¢(h©żo)╠Ä└ĒŲ„Ż¼īŻķV×ķ╣żśI(y©©)ūįäė(d©░ng)╗»╝░ūįäė(d©░ng)╗»┐žųŲĄ╚æ¬(y©®ng)ė├Č°įO(sh©©)ėŗ(j©¼)ĪŻŽĄĮy(t©»ng)ĮY(ji©”)śŗ(g©░u)┐“łD╚ńłD2╦∙╩ŠĪŻ
ŽĄĮy(t©»ng)╣żū„įŁ└ĒŻ║Į╗┴„ļŖė╔š¹┴„ś“▐D(zhu©Żn)ōQ×ķų▒┴„ļŖŻ¼ę╗▓┐ĘųĮø(j©®ng)▀^ĘĆ(w©¦n)ē║─ŻēK║¾ū„×ķdspąŠŲ¼║═Ųõ╦¹ų„┐ž░Õ╔ŽļŖūėŲ„╝■Ą─╣®ļŖļŖį┤Ż¼ę╗▓┐Ęųū„×ķ |