���ڿ������^�y��������ͬ��늙C�Կ��_����
����P�� �����S�� ����
(�Ͼ����պ����W�����Դ���c����ң����K�Ͼ�210016)
ժҪ�������������V����Փ�����^�y����������ͬ���ŷ�ϵ�y��ؓ�d�D���M�Ќ��r�^�y��������ؓ�d�D�ص��^�yֵ��ϵ�y���γ��D��ǰ���a�����O��������ϵ�y�ĄӑB���ܺͿ��ɔ_������ԇ��C����ԓ����������Ч�������@�����ϵ�y�Ŀ��ɔ_�����������ԡ�
�P�I�~���������^�y��������ͬ��늙C���Կ��_����
�ЈD���̖��TM 301 2��TM 35t�īI��־�a��A���¾�̖��1673��6540(2010)05-027-05
0 �� ��
����ͬ��늙C(PMSM)�����w�eС���Y�����Ρ��߹����ܶȡ���Ч�ʡ����D�ؑT�Աȵȃ��c���ڬF�������ŷ�ϵ�y�еõ��ˏV�����á����Ǹ����ܵ��ŷ��{��ϵ�y�\����r���s������Ŀ��Ʒ����y�ԑ����r׃��ؓ�d�_�ӣ��Ķ�����ϵ�y�ĄӑB���ܺͿ��_����׃������ϵ�y�Ŀ��_���ܷ��棬Ŀǰ���ȡ�����Ҫ���Ì�ؓ�d�_�ӌ��r�^�y���γ�ǰ���a���ķ��������īI[1-2] ��������Կ��_���������īI[3]����˻��ڔ_���^�y���ĵ��ٿ��Ʒ������īI[4]����˻���ؓ�d�D���^�y�Ŀ��_���Ʒ������@Щ�����M��ȡ���˺ܺõ�Ч��������Ҫ������ؓ�d�_���^�y�����L��ϵ�y���r�Բ������⣬����PMSM�D�Ӟ������w�Y���������~���ţ����p�d���߿��d�£�����y�����ɔ_Ӱ��^���e���ڵ�����r�£�����Ӱ���ؓ�d�_�ӵČ��r�^�y��
���ĽY�Ͽ������V���㷨���ŷ�ϵ�yģ���OӋ��һ�N�������^�y�������r�ʴ_�،�ϵ�y��ؓ�d�D���M���^�y�������^�yֵ��ؓ�d�_���γ�ǰ��У���h������ؓ�d�D�صĔ_�Ӽ����a����ԇ������ԓ�����܉���Ч���PMSM�����{��ϵ�y�ĄӑB���ܺͿ��_���ܡ�
1 �xɢ�������V��ԭ��
�������V���㷨[5-6]��һ�N****��Ӌ�㷨�����㷨�O���������ģ���`��͜y�������܉���Ч������ϵ�y�`��͜y���`���B��Ӌ��Ӱ푣���ߠ�B��Ӌ�ľ��ȡ�
�O�xɢ����ϵ�y��m�Sϵ�y���̺�n�S�y�����̷քe��ʽ(1)��(2)��ʾ��
ʽ�У��ӑB��{wk}�c�y����{vk}�ǻ������P�����ֵ�������У��������е�k��jģ�ͻ����yӋ���|��
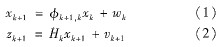
��ϵ�y��B��Ӌ��ʽ(3)��(4)��ʾ��ʽ�С�^����ʾ��B׃����Ӌֵ����k����ʾk�r�̠�B׃���Ĺ�Ӌֵ����k+1��k����ʾk�r���A�yk+1�r�̵Ġ�B׃��ֵ��
ʽ�У���xk+1�����Ք����y��ֵ֮��P���Hֵ�ĞV����Ӌ�`�
��xk+1,k�����Ք����y��ֵ֮ǰ�����Hֵ���A�y��Ӌ�`�
�քe����xk+1����xk+1,kȡ����ɵÞV���������������V����ʽ���V����Ӌ�`����(Pk+1)���V������(kk+1)��һ���A�y��֭�`����(Pk+1,k)�����У�Kk+1ȡ�V������ֵ�r��Pk+1��С���Ķ����Fϵ�y�ľ���****�V����
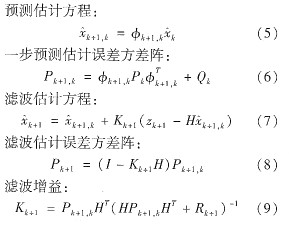
������ԭ����D��D1��ʾ���xɢ�������V�������f�ƹ�ʽ���¡�
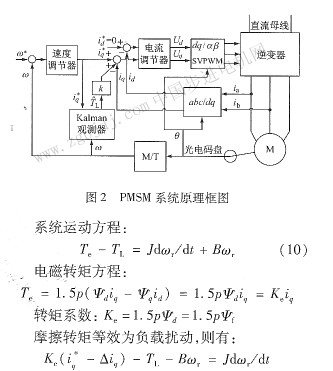
2 �������Կ��_�^�y���OӋ
PMSM�{��ϵ�yԭ����D2��ʾ��ϵ�y���ÿ��g�m���}���{�ƣ�SVPWM�����g�����������a�S���������Ŀ��Ʒ�����
ʽ�У�iq����q�S����o��ֵ��
��iq����q�S�o������c�������֮�
ʽ�У�Te����늴Žo���D�أ�Te=Keiq��
T1������Чؓ�d�D�أ�T1=TL+B��r+Ke��iq��
|