����ͬ��늙C(j��)�����ŷ�ϵ�y(t��ng)���о��c��(y��ng)��
��(y��n)���N�������£�������
(�P��늚⼯�F(tu��n)�ɷ�����˾���㽭����312300)
ժҪ����B����ͬ��늄�(d��ng)�C(j��)�����ŷ�ϵ�y(t��ng)������?c��i)����˽����ŷ�ϵ�y(t��ng)��ܛ��Ӳ���Y(ji��)��(g��u)�����ڴ˻��A(ch��)���M(j��n)����ϵ�y(t��ng)�ęz�y(c��)��ͨ�^�����C����ԓϵ�y(t��ng)�������õ�λ�ÿ��Ƽ��ٶ�푑�(y��ng)���ܣ���(sh��)�F(xi��n)�ˌ�(du��)��ͬ��늄�(d��ng)�C(j��)�����ܿ��ƺ�ϵ�y(t��ng)�ɿ��Ե�Ҫ�M��͑�������
�P(gu��n)�I�~������ͬ��늙C(j��)�������ŷ���λ�ÿ���
�ЈD���̖(h��o)��TM 351 �īI(xi��n)��(bi��o)־�a��A���¾�̖(h��o)��1673-6540��2010��05-0049-03
0 �� ��
�S���b���Ԅ�(d��ng)��ˮƽ�IJ���l(f��)չ���ŷ�ϵ�y(t��ng)�đ�(y��ng)��Խ��Խ�V������(sh��)����̖(h��o)̎����(DsP)���g(sh��)�İl(f��)չ�͑�(y��ng)��[1-2]����(du��)�T���\(y��n)��(d��ng)�����I(l��ng)����Ҫ���늙C(j��)�����ܿ��ƣ�ȫ��(sh��)�ֻ������ŷ����g(sh��)���˾���Ƅ�(d��ng)���ã������ϵ�y(t��ng)���ٶȡ����ȡ��ɿ��Լ����ɔ_������
��ȶ������}���{(di��o)��(SPWM)�����gʸ���}���{(di��o)��(sVPwM)���g(sh��)����늉������ʸߵȃ�(y��u)
�c(di��n)[3-4]���ڽ���׃�l�{(di��o)��ϵ�y(t��ng)�ϑ�(y��ng)�ÏV��[5]ͬ�ӏV����(y��ng)���ڸ��N�����ŷ�ϵ�y(t��ng)�����Ľ�Bһ�N��TMs320F2810����ƺ��ġ�����ͬ��늄�(d��ng)�C(j��)(PMsM)���(zh��)�ЙC(j��)��(g��u)������sVPwM�Ľ����ŷ�ϵ�y(t��ng)��ԓϵ�y(t��ng)�����w�eС�������p�����ĵ͡��{(di��o)����ȃ�(y��u)�c(di��n)����Ԍ�(sh��)�F(xi��n)��(du��)PMsM�����ŷ�ϵ�y(t��ng)���ٶȡ�λ�á��D(zhu��n)�صľ��_���ơ�ϵ�y(t��ng)���¿ɷֳɃɴ��K������TMS320t��810����ƺ��ĵĿ��ư�K�������ܹ���ģ�K(IPM)���(q��)��(d��ng)���ĵĹ����(q��)��(d��ng)��K�����һЩ�o���O(sh��)�䣬��D��A�@ʾ�˙C(j��)���桢�I�P���@ʾ��Ԫ�ȡ�
l ϵ�y(t��ng)��Ӳ���Y(ji��)��(g��u)
1��1���·
���·����������׃������Դ��������׃���Դ���o(h��)�����]�����������܉�ʹ�ã��������x�����30 A��600 V����ɿ�����ģ�K������(�����)Acݔ�룬��(j��ng)��������ĸ��ֱ��늉��o��һ��(j��)��׃��늣�ͬ�r(sh��)����ܛ����(d��ng)�·�M(j��n)�����˲�g����ݱ��o(h��)��
1��2 IPM
IPM������׃���Ĺ����Ǹ���(j��)�����·��ָ����Դ��Ԫ�ṩ�ĸ߉�ֱ����D(zhu��n)׃?y��u)��ŷ�늙C(j��)�����@�M�е����ཻ��늣��Ԯa(ch��n)ţ����늴��D(zhu��n)�ء�����·���ü��(q��)��(d��ng)�·�����o(h��)�·���ʹ���һ�w��IPM���@�N���ɽY(ji��)��(g��u)�pС���߾�����ķֲ�늸У��������_ͨ���P(gu��n)����и��õ�һ���ԡ��c��ͨ�Ľ^�����p�O���w��(IcBT)ģ�K��ȣ����ڼ������(q��)��(d��ng)�ͱ��o(h��)�·��ʹ��ϵ�y(t��ng)��Ӳ���·�O(sh��)Ӌ(j��)���_�l(f��)׃�ú�(ji��n)�Ρ��ɿ�����ϵ�y(t��ng)�x�����˾��PM20csJ06�����͉���600 V���~�������20 A��****�_�P(gu��n)�l�ʞ�20 kHz��
l.3����ģ�K
��ϵ�y(t��ng)��TMs320F2810����ƺ��ģ����һЩ����o���·������Ɍ�(du��)PMsM�Ŀ��ơ�
1��3��1����z�y(c��)
늙C(j��)�����LEM����������z�y(c��)�õ��ɱ�����ģ�M늉���̖(h��o)�����ֵ��3��ʮ3 V֮�g�����Ҳ���(d��ng)��DsP��(n��i)��ֻ��̎��ΘO�Ե�ݔ����̖(h��o)����(du��)A��D�ɘӕr(sh��)������늉�̧���·���Ķ�ʹ늉�׃�Q��0��3 V֮�g����DsP�ɘӁ�z�y(c��)�������̖(h��o)��
1.3.2λ���D(zhu��n)�ٙz�y(c��)
ϵ�y(t��ng)���Ï�(f��)��ʽ��늾��a������·�����}�_��̖(h��o)A��B��һ·��λ�}�_��̖(h��o)z����(sh��)�F(xi��n)�ٶȼ�λ�÷��������⣬��·���120���ij�ʼλ���}�_��̖(h��o)(u��V��w)��(sh��)�F(xi��n)��ʼλ�õĶ�λ��ͬ�r(sh��)���ˌ�(sh��)�F(xi��n)����DsP��Ҫ���3 3 V���@��·��̖(h��o)(A��B��z��u��V��w)����(j��ng)�^74LVTH244A���ٷքe�ӵ�DsP�IJ��@�˿�(cAPl��cAP6)��ͨ��I��O�˿�(10һPAl3��10PAl5)��
1��3.3���gʸ���}���{(di��o)��
�����������b�õĺ��ļ��g(sh��)��PwM���g(sh��)���V����(y��ng)����׃�l�{(di��o)��늙C(j��)����(d��ng)�С�
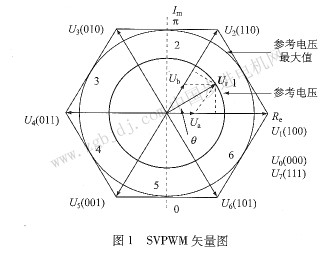
PwM���g(sh��)�Б�(y��ng)������ձ����sPwM��sVPwM����(sh��)�`����Փ�C�����csPwM���g(sh��)��ȣ�sVPwM��ʽ���иߴ��C�����ͺ�늉������ʸߵȃ�(y��u)�c(di��n)�����Խ��Խ�ܵ��˂�����ҕ����D1��ʾ��ͨ�^�_ͨUa��Ub��ͬ�ĕr(sh��)�g��ʹ��ɂ�(g��)�ϳ�늉�ʸ����Ч�څ���늉�ʸ��Ur��
��DsP�Ќ�(sh��)�F(xi��n)sVPwM�㷨��ԓ�㷨�õ��Ļ���늉���(j��ng)PwM��ݔ����IJ���(��ӞV���·)��D2��ʾ���D������l��2�������늉����Σ���****��ֵ��UDc������3������1�p����2���õ��Ļ�����늉����Σ��ĈD�п��Կ���sVPwM�����p���^�{(di��o)�ƣ�ݔ���ľ�늉����Ξ����Ҳ����csPwM(�����****��늉���ֵ��UDC��2)��ȣ������늉��������ʡ�
|