����usb�ӿڵ�Ƕ��ʽ�\�ӿ������OӋ
�]������܊
���������I��W�C늹��̌WԺ������100041��
ժҪ���_�l��һ�N����usb2. 0�ӿڵ�Ƕ��ʽ�\�ӿ�������̽ӑ��ԓ�\�ӿ��������wϵ�Y���Č��F����usb�ӿ�ģ�K��ܛ����Ӳ���OӋ�M����Ԕ���Ľ�B����ԓǶ��ʽ�\�ӿ�������������������Cе�ֵĿ����^���У����Y������ͨ�^�Uչusb�O��������Č��F���S��ͬ�r�ڌ��r����Ҫ�ߵĈ��Ͽ��ԝM���\�ӿ��Ƶ�Ҫ��
�P�I�~��usb2.0; dsp; fpca��Ƕ��ʽ�\�ӿ�����
��Ȧ���̖��tp273 �īI��־�a��a ���¾�̖��1001-6848(2010)06-0100-03
0�� ��
���S�\�ӿ���ϵ�y�ڼ���ӹ������I�C���ˡ����ؙC�����k���Ԅӻ��O�䡢���_��܊�������S��ϵ�y�Լ���������ϵ�y�đ���Խ��Խ�V����pci��isa�ӿڵĶ��S�\�ӿ����������M���L���x��ݔ��������Ҫ�嵽ipc�Uչ������棬ռ��ipc����YԴ�������C���ó����^���Ĕ�����ŵ�����fifo�У����ܷ���^�������S��ָ��Ϳ��ƅ������_�lt��Ҳ���^���s����usb2.0���g���H���Ԍ��F���ٔ�����ݔ�����Ҿ��м��弴�ã����ĵͣ��B�Ӻ��㣬�r����˵����c��ͬ�r���Ԍ��岻ͬ�Sָ������ķ��_��������Ҫ�����s�ļ��g̎������������������C����Ƕ��ʽ�\�ӿ��������������һ�N����usb2. 0�ӿڵĶ��S�\�ӿ�������ԓ�\�ӿ������c��λ�C���Ԍ��F���ٔ���ͨ�ţ���ȫ�M������Cе�ֵĿ�������Ҫ��
1Ӳ���Y���OӋ
1.1���w�Y���OӋ
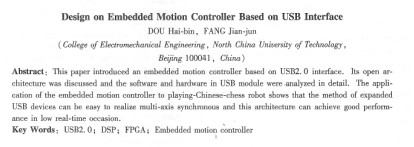
�\�ӿ�����Ӳ���Y����Dl��ʾ���\�ӿ�����ͨ�^usb�ӿڏ���λpc�C�@ȡλ��ָ�����ָ���Լ���Ҫ�{���ą���������pid�{��ϵ�������\�ӿ�������dsp��λ��ָ���M�дֲ��a����ÿһ�����a���ڣ�dsp�����������������a�}�_��̖�@ȡ�S�Č��rλ�ã�Ӌ�������ֵ�c���Hֵ֮�g��ƫ���ƫ���M��pid�{�����@�ø��S���M�o���������M�o����������fpga���}�_�l��ģ�K��ɾ����a�������a��ݔ���}�_��̖�����ŷ���������늙C�\�ӡ�ͬ�r�\�ӿ��������Ը���pc�C������ָ����pc�C�ς����ŷ��S���\�Р�r����Ϣ��ͨ�^pc�����@ʾ������
1.2 usbģ�K�OӋ
sx2��5�����c��ep(o��2��4��6��8)��epo�û���usb�ӿڵ�Ƕ��ʽ�\�ӿ������OӋ�]���ȁ��ṩ�������C�c�O��֮�g�����á�������B��ͨ�Ņf�h���ڱ��OӋ�Ќ�ep2�O�Þ�out���c��ؓ؟����λ��ָ��������Þ�512�ֹ��p���_��ģʽ��ep6�O�Þ�out���c��ؓ؟����pc��������ָ����Þ�512�ֹ��p���_��ģʽ��ep4�O�Þ�in���c��ؓ؟���́����\�ӿ������Ġ�B��Ϣ�����Þ�512�ֹ��p���_��ģʽ���p���_��ģʽ����ʹusb���x���ߌ�һ���������r����һ����������ͬһ�����c�ȵ���һ�����_�����ɹ�dsp�����x���ߌ�������ͨ�^�����ɼ�������ԘO����ߔ����Ă�ݔ�ٶȣ����õ�����usb2.0�ĸ����ԡ�
sx2�cfpga���B�ӈD��D2��ʾ��fifoadr[00: 02]�Á��x��fifo������˿ڣ����w�Č���Ҏ�t�ɲ��sx2�ļ��g�Y�ϣ�slrd��sx2���x��Ч��̖���csloe�̽ӣ��cdsp���xʹ����̖xrd���B��slwr�錑��Ч��̖���cdsp�Č�ʹ����̖xwe���B��flaga��flagb��flagc�����fifoadr[2:0]�x���fifo�Ġ�B��ready��̖��Ч�r֪ͨdsp��sx2��fifo�M���x����flagx��ready�Ġ�B������fpga���һ���Ĵ����У�dsp��fpca������zonel���g��(ox4000h)��ͨ�^a[3��4]�x�д˼Ĵ�������ͨ�^������d[0��7]���Ĵ����ă�������dsp��dspͨ�^��ԃ���˿�fifo�Ġ�B�������������
���ʹ�����p���_��ģʽ����ֵİl�]��usb2.0�Ă�ݔ�ٶȿ�ă��ݡ����w�Ĺ����^�̞飺����λpc�CҪ�l��λ��ָ��o�\�ӿ������r����λ��ָ��l�͵�ep2��dspͨ�^�xfpga�е�sx2�Ġ�B�Ĵ�����֪ep2��fifo���Д�����Ȼ��λ�Ô����x��dsp���M�дֲ��a�㷨������λpc�CҪ�x����ǰ���S���\�Р�B�r��������ָ��l�͵�ep6��dsp������ָ���x�˃Ȳ��Ĵ������Д��������Ҫ��ľ��w�� |