һ�N�o����h(hu��n)����ͬ��늄әC(j��)�ŷ����Ƶ��о�
��(y��n)���N1���Ό���1��������1���T��2
��1�P��늚⼯�F(tu��n)�ɷ�����˾������312300��2����늙C(j��)�о���������710077��
ժҪ��ᘌ�����ͬ��늄әC(j��)�Ă��y(t��ng)���ƣ���������ͬ��늙C(j��)���gʸ���}���{(di��o)��ԭ��( svpwm)�M(j��n)�н���ɼ���·�����̖������늙C(j��)���D(zhu��n)�ؼ��D(zhu��n)�٣�ԓ�������һ�N���ھ��_�Ĺ�늾��a��̖�y�ٵğo����h(hu��n)ֱ��늉����Ʋ��ԣ�ʡȥ��·����ɘ���̖����(ji��)�s�˳ɱ�����߿ɿ��ԣ�ͨ�^dspоƬtms320f2407�O(sh��)Ӌ�˹��I(y��)�p�x�C(j��)��������Ӳ����ܛ�������F(xi��n)�˟o����h(hu��n)����ͬ��늄әC(j��)���ƣ��M��͑�������
�P(gu��n)�I�~���o����h(hu��n)�����I(y��)�p�x�C(j��)������ͬ��늄әC(j��)���ŷ�����
�Ї����̖��tm341; tm351 �īI(xi��n)��(bi��o)־�a��a ���¾�̖��1001-6848(2010)06-0093-03
0�� ��
���y(t��ng)���I(y��)�p�x�C(j��)�����x����늙C(j��)���әC(j��)�^�\(y��n)�D(zhu��n)���D(zhu��n)��һ����3 000 r/min���ϣ����C(j��)�r�x����Ó�_����늙C(j��)��̎�ڿ��d�\(y��n)�D(zhu��n)�����ܸߡ�������ͬ��늙C(j��)(pmsm)���ڹ��I(y��)�p�x�C(j��)���(q��)�ӣ��Ɍ��F(xi��n)���I(y��)�p�x�C(j��)�ĸ��N�Ԅӻ����ܣ����Ҿ����D(zhu��n)�ӑT��С��푑�(y��ng)�ٶȿ죺Ч�ʸߡ��w�eС�������͵ȃ�(y��u)�cr��pmsm���y(t��ng)���Ʒ�ʽ�Ļ���˼·�����ÿ��gʸ��ԭ���M(j��n)�н��ʹ����ͬ��늙C(j��)������M(j��n)�зֽ⣬�Ķ���ֱ��늙C(j��)�Ŀ���Ҏ(gu��)�Ɂ��M(j��n)�п��ƣ��y�c������Ҫͬ�r�ɘ�늙C(j��)���ك�·�����ֵ���������M(j��n)��ʸ��׃�Q��clark׃�Q��park׃�Q������K׃�Q��늉���̖���īI(xi��n)[2-4]ᘌ��oˢ늙C(j��)�M(j��n)������Փ������ͨ�^ģ���㷨����M(j��n)��ģ���㷨�ṩ�˺ܺõĄӑB(t��i)���ܣ����㷨�^�ڏ�(f��)�s�������ڏV��ʹ�ã���Ӌ��C(j��)����Ӌ������һ����������Ӳ���ɱ���ͬ�rҲռ���˱��^���ܛ���_�N�������ڹ��̌��F(xi��n)��
ᘌ��~��Ť�������㶨�Ĺ��I(y��)�p�x�C(j��)��늙C(j��)��������һ�N���ھ����Ĺ�늾��a��̖�y�ٲ�ͨ�^���gʸ���}���{(di��o)�ƿ��Ƶ�늙C(j��)����ģʽ������늙C(j��)�ĸ���Ŀ�����ڿ���늙C(j��)���D(zhu��n)�أ�Ҳ���F(xi��n)��늙C(j��)�D(zhu��n)�ٵĿ��ƣ�svpwm�����þ��ǿ������D(zhu��n)�ء���늾��a���z�y���}�_����dsp������Ӌ�����(d��ng)ǰ���D(zhu��n)�٣�ͬ�ȶ����D(zhu��n)���M(j��n)�б��^�����^��ͨ�^�e�ַ��x��pid�㷨���ó���(y��ng)��(d��ng)ʩ�ӵ��D(zhu��n)��ֵ��ͨ�^svpwm�㷨���M(j��n)��pmsm늙C(j��)늉��Ŀ��ơ��l(f��)�]dsp���������\(y��n)�ӿ����I(l��ng)��đ�(y��ng)�Ã�(y��u)�ݣ�ԓϵ�y(t��ng)������dspоƬ����������Ժ��οɿ�������·��������㷨������ȫ����ܛ�����F(xi��n)���@�N�������õ��Dz��z�y�����ֱ��ͨ�^늉����Ƶļ��g(sh��)�����ڹ��I(y��)�p�x�C(j��)�@�ؓ(f��)�d����С�����ƾ���Ҫ���^�͵ęC(j��)е��ԓ�����^���m�á�����ʡ��������y���h(hu��n)��(ji��)��ʹ����ϵ�y(t��ng)�����ɿ����������˳ɱ���
l ϵ�y(t��ng)��Ӳ���Y(ji��)��(g��u)
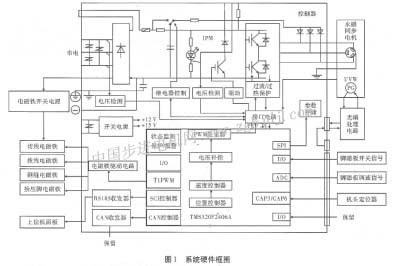
���I(y��)�p�x�C(j��)���ŷ�����ϵ�y(t��ng)���w�Y(ji��)��(g��u)��D1��ʾ������220 v���ݔ�룬�����V����ݡ��Ƅ�����ipm��׃����pmsm��(g��u)��ϵ�y(t��ng)�Ĺ����·����늾��a����̖��(g��u)�ɵ��ٶ�λ�̙z�y�·�͔�(sh��)����̖̎����( dsp)��(g��u)�ɿ��ƻ�·���˙C(j��)���桢�I�P���N����늴��F��(g��u)������·��
����220 v늉���(j��ng)�^�����V����õ���(w��n)����ֱ���Դ���o���ܹ���ģ�K(ipm)������ģ�K��svpwm�®a(ch��n)��i��pwm늉����opmsm��Ȼ��pmsm���ӿp�x�C(j��)�C(j��)�^�M(j��n)�пp�x������
����ϵ�y(t��ng)������·��׃���������ܹ���ģ�K��ԓģ�K����20 a/600 v igbt���ʹܣ�����(n��i)���(q��)���·�����O(sh��)Ӌ���^�����^�����^�ᡢǷ���ȹ��ϙz�y���o(h��)�·��ͬ�rϵ�y(t��ng)߀�]Ӌ��ܛ�����·�Ԝp�ُ�(qi��ng)늌�����·�ě_������ϵ�y(t��ng)���ϱ��o(h��)�h(hu��n)��(ji��)��߀�O(sh��)��������·�^����Ƿ�����^�ᡢ�^�d���ƄӮ�������늾��a�������ྀ�ȱ��o(h��)���ܣ�������̖��ܛӲ����ϙz�y��һ�����F(xi��n)���o(h��)��̖�����ͨ�^ܛ����Ӳ��߉���̷��ipwm�(q��)����̖���cpmsmͬ�S���D(zhu��n)�Ĺ�늾��a���͙C(j��)�^��λ���a(ch��n)��һ�������}�_��̖��pmsm�D(zhu��n)��λ����̖������dsp���ٶȺ�λ�ÿ�䓡��p�x�C(j��)1�����r��ͨ�^�_̤���{(di��o)�����o��pmsm��Ŀ��(bi��o)�D(zhu��n)�٣�ͨ�^�˙C(j��)�������Ŀ��(bi��o)λ�ã�ͨ�^�z�y�C(j��)�^��λ��������ͣ���̖����ϸ�������늴��F��������ɿp�����W(w��ng)�p���ӹ̿p����ᘿp�ȸ��N�p�ƹ�ˇ��
2ϵ�y(t��ng)��ܛ���O(sh��)Ӌ
ϵ�y(t��ng)�ĸ��N�p�ƹ����Լ����Ʋ��ԵČ��F(xi��n)����Ҫ��ϵ�y(t��ng)ܛ������ɣ���ˣ��ɿ��� |