�oˢֱ��늄әCλ�Â��������bλ��
�ܞ���ë���䣬��骣������w
(����x����������300131)
ժҪ��ᘌ��F�ڏV�����õĻ��ڻ���Ч��ԭ���Ĵ���ʽ�_�Pλ�Â��������ԃ�����ͨ������������B��ʽ����늄әC�������ƌ��˟oˢֱ��늄әC������D�صȅ������ڴ˻��A���f�����@�M****�Q��Ƕȣ��_����λ�Â���������Փ���bλ�ã��eָ����λ�Â�����λ�ð��b���늄әCЧ�ʵ�Ӱ푣�Ȼ������˲�ͬ�@�M�»���Ԫ����****���bλ�ã��������˟oˢֱ��늄әC����Ԫ�����bλ�õĴ_��������
�P�I�~���oˢֱ��늄әC��λ�Â�����������Ԫ�������bλ��
�ЈD���̖��tp36+l �īI��־�a��a ���¾�̖��1001-6848(2010)06-0090-03
o�� ��
�oˢֱ��늄әC(bldc)�����@�M��ͨ�����͕r�gȡ�Q��λ�Â��������D��λ����Ϣ��λ�Â�������횜ʴ_�y���D�ӴŘOλ�ã������D�ӴŘOλ����̖�D�Q�ɿ������·��������̖������ֱ̖��Ӱ��������@�M�ēQ��λ�ã�Ҳ��������D�غ�Ч�ʮa��ֱ��Ӱ푡�Ŀǰbldcʹ�õ�����λ�Â������ǻ��ڻ���Ч���Ĵ���ʽ�_�Pλ�Â������������ԃ�����ͨ������������B��ʽ����bldc�������ƌ���****�Q��Ƕȣ������f���˻���Ԫ����****���bλ�úʹ_��������
1 bldc��늴��D��
�麆��������Ӌ�㣬�ڲ�Ӱ�Ά��}�����ͽYՓ��ǰ���£����������¼��O��
�ټٶ���϶�ň��ؚ�϶�����ҷֲ���
���@�Mͨ늕r���a���Ķ��Ӵň�����϶�ň���Ӱ푺��Բ�Ӌ��
��늄әC�������������pwm���Ʒ�ʽ���@�M������ν����ھ��β������@�M��ͨ�r�g����������ƞ�㶨ֵ����˼ٶ������S��϶�ň���׃����׃����
�ܼٶ������@�M��ȫ���Q���@�M���к�늚�r�g�������Բ�Ӌ��
���ڃ�����ͨ��������B���Ʒ�ʽ��ÿ����B��������@�Mͬ�r����ͨ늣�����ϳ�늴��D�؞飺
ʽ�У�l�錧�w��Ч�L�ȣ�d��늿�ֱ����n�����@�M�є���
����a���@�M��ͨ��B����ʣ��O���_ͨ�Ǟ�¡���a���_ʼ��ͨ�r��b��̎�ڷ���ͨ��B�������@�M��ͬ��ͨ��/3늽Ƕȣ���a��b������늽Ƕȷ�ͬ��ͬ�rͨ늣�����ʽ(1)����������^��늙Cƽ��늴��D�؞飺
2����Ԫ������Փλ��
2.1�_ͨ�ǦµĴ_��
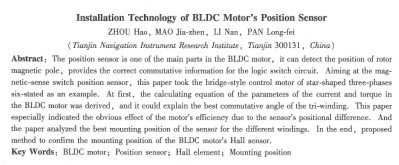
��ʽ(2)��֪���@�M�_ͨ�����׃����Ӱ�늙Cƽ��늴��D�صĴ�С���Dl�o���˿��ڦУ�2֮�g׃���r��늙C�ϳ�늴��D��mp��׃����r����Ҋ���_ͨ�ǿڞ��/6늽Ƕȕr늙Cݔ����늴��D��n��****�����ԣ�늙C�@�M����ԓ���@�M��늄��^����/6늽Ƕȵ�λ���_ʼ��ͨ�������m��ͨ2��/3�������a����ƽ��늴��D��****��
2.2����Ԫ������Փ���bλ��
����������ƌ��Y�������_ͨ�Ǧ��/6늽Ƕȕrƽ��늴��D��****������ÿ���@�M�Ļ���Ԫ�������ԓ���@�M��늄���ؓ�ɂ��^���c���/6늽Ƕȵ�λ�ã��o�����@�M��������ͨ�Ŀ�����̖��
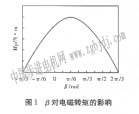
�D2�����Ԫ���c��϶�ň��ĽǶ��Pϵ����a���@�M�������D2(a)������a���@�M�S���c�D��ֱ�S�غϕr���@�M��늄ݞ��㣬�@�M�S���c�D�ӽ��S����/2늽Ƕȣ����D���D�^��/6늽ǶȺ�a���@�M���_ʼ��ͨ���˕r����Ԫ�����λ���D�ӽ��S�ϣ�����Ԫ��ݔ����̖�l�����D�����ܽo�����_���@�M��ͨ��̖��������λ�Â������c�@�M�S��֮�g늽ǶȞ��գ��t��D2(b)��ʾ�ڑ����ڣ�
3����Ԫ���Č��H���bλ��
ǰ���ƌ����˻���Ԫ�����ڶ����@�M�ϵ���Փλ�á����ڲ� |