����dsp�Į���늙Cdtcϵ�y�о�
�������R��ƽ�����W֥
���M���I���g�WԺ��ӹ��̌WԺ���ϲ�330108��
ժҪ���ڽ�������늙Cֱ���D�ؿ���ϵ�y�Ĕ��Wģ�ͻ��A�ϣ���B��һ�N��tms320f2812������оƬ�����ܹ���ģ�K�������·�����ÿ��g늉�ʸ���}���{�Ƽ��g�õ���׃�����_�P������̖��ȫ������늙Cֱ���D�ؿ���ϵ�y���F���o����ϵ�y��Ӳ����ܛ���Y�������Y������������svpwm���g�Į���늙Cֱ���D�ؿ���ϵ�y���F��
�Σ����܃�������������늙C���\��Ʒ�|�����r늉������ʡ�
�P�I�~��tms320f2812��ֱ���D�ؿ��ƣ����ܹ���ģ�K������늙C
�ЈD���̖��tm343 �īI��־�a��a ���¾�̖��1001-6848(2010)06-0074-04
0�� ��
����늄әCֱ���D�ؿ������^ʸ������֮����һ�N���͵ľ��и����ܵĽ���늙C׃�l�{�ټ��g����ͬ��ʸ�����Ƽ��g�����ںܴ�̶��Ͻ�Q��ʸ��������Ӌ����s����������늙C����׃����Ӱ푡����H�����y���_����Փ�����Y����һЩ��Ҫ���g���}����ԭ�������ÿ��gʸ������ֱ���D�ؿ���ϵ�y��ԭ�������ÿ��gʸ�������������ö��Ӵň��������r�z�y���Ķ��������늉��M��3/2׃�Q���Ķ�ֱ�����oֹ�Ħ�-������ϵ��Ӌ�㽻��늙C���D�غʹ�朣��ٷքe�c�o���D�غʹ���M�б��^���M��bang-bang���ƣ�����������ݔ���Y���ʹ��λ�ò���****�_�P���a��pwm��̖��ֱ�ӌ���׃�����_�P��B�M��****����01�����Ľo����һ�N���ڔ�����̖̎����tms320f2812�����ܹ���ģ�K�Į���늙Cֱ�Ӿ��D���ƵČ��F�������U����ϵ�y��Ӳ���M�ɺ�ܛ���OӋ����������ϵ�y�M���ˌ���о����o���ˌ��Y����
l dtcϵ�y���Wģ�ͺͿ���ԭ��
1.1����ϵ�y���Wģ��
���ÿ��gʸ������������ͨ�^����׃�Q�ɵ�ֱ���D�ؿ���ϵ�y�ڦ�-������ϵ�ϵĔ��Wģ�͞飺
��늉����̞飺
���Ӵ�朷��̞飺
�D�ط��̞飺
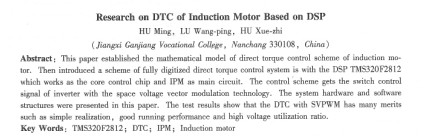
1.2ϵ�y����ԭ��
��������ģ�ͣ��ɵ�ֱ���D�ؿ���ϵ�y��ԭ����D��D1��ʾ������ϵ�y�ڵ����\�Еr���ý��ƈA�εĴ��܉�E���Դˁ����C�ڵͶ����l���¾S���D�غʹ�朻�����׃���ɈDl��Ҋ��ͨ�^�z�y����늉�ua��ub��uc�Ͷ������ia��ib��ic����3��2����׃�Q���õ�u����u�£�i����i�£���ʽ(1)~ʽ(5)Ӌ������Ӵ�机�늴��D���^�yֵ���Ɍ������M���]�h���ƣ��ɴ�����ڵĿ��gλ�úͲ��_�P��ݔ���_�P��B������׃��̎��ijһ������B�r�����܉�E��ԓ��B������늉�ʸ�������\�ӣ��ٶ��c늉�ʸ���ķ�ֵ�ɱ��������˸�׃���ʸ�������D�ٶȣ���������늉�ʸ��������늉�ʸ���������g�����ֹͣ���ӡ�����ʹ�ù���ʸ������ʸ��������Ч���ƴ���ٶȡ��@���x����m�����g늉�ʸ����ʹ���Ӵ��ʸ����܉�E���ƈA�Σ�����ʸ�����D���ٶ�ͨ�^��׃��׃��ݔ������늉�ʸ������늉�ʸī�����Õr�g�����ơ���늉�ʸ�������D��bang-bang���Ɓ팍�F�ģ�������^���ǣ����D���c�o��ֵ�IJ�ֵ���ڜ��h���ȕr����׃���D����ʸ�����ƣ����ͣ�D���D���½���ֱ���D���c�o��ֵ�IJ�ֵС�ڜ��h���ȕr�����D�˹���ʸ����B����˷��͡������^���У�������Ӵ��Ҫ�����ӣ�d��1=1��������Ӵ��Ҫ��pС��d��1=0;����D��Ҫ�����ӣ�dte=l������D��Ҫ��pС��d te=o������D�ز�׃��dte=0������dd��1��dte�����Ӵ���ڿ��g��λ�ã����_�P���x�����m��늉�ʸ������׃���ٌ����g늉�ʸ���ڲɘӽY���r����늙C�Ķ��Ӷ˿���늙C�\�С�
2ϵ�yӲ���cܛ���OӋ
2.1ϵ�yӲ���M��
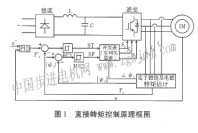
��D2��ʾ��ϵ�y��tms320f2812����ƺ��ģ���ipmģ�K����׃���팍�F������늙Cֱ���D�ؿ���ϵ�y��ȫ���ֻ����ƿ�D��
|