�������β��M늙Cλ�Ùz�y��noc�еIJ��Ќ��F
Ӻ��ϼ
(�Ϸ���ӹ��̌WԺ���Ϸ�230037)
ժҪ��ᘌ��������β��M늙C������Y�������D���c�������M��λ�Ùz�yϵ�y�Ĕ��W��ģ�������D�����wĿ�˹��c�ĸ��ܶ�Ӌ�㆖�}�����ö��΄ղ��л��������ķ�����ͬ�r�����m�ϲ���Ӌ���Ƭ�ϾW�j(noc)Ӳ���Y���팍�F��ӑՓ��ǰ�΄��¹��ă��ȵ�iyocӳ�䆖�}������Y���������΄ղ���������Ч��Ҫ�ȴ�������Ч�ʸߵö࣬�����_���A��Ŀ�ģ������fpca�OӋ��λ�Ùz�y�Č��r���о��ṩ������
�P�I�~������늙C��noc��ӳ�䣻����������Ч��
�ЈD���̖��tm383. 6 �īI��־�a��a ���¾�̖��1001-6848(2010)06-0043-05
0�� ��
����������ɶ�늄әC����ж�N������hopkins��W�OӋ������һ�N���Ų��M����늄әC�����w�eС�������p������ָ�˸ߡ����ƺ��εȃ��c���ɞ�Ŀǰ****�Б���ǰ;��һ�N�Y����͡���Y�����M�c���P�I���g���ڲ����̽���У���������늙C�D�ӵ�λ�Ùz�y�ǿ���ϵ�y�е��P�I���g֮һ�����Ƽs����늙C��Փ�о��͌��H�_�l��ƿ�i��cregory s chirikjian�������īI[5]������˔��W����Ӌ��ֻ�m��������ķ������īI[6]�и��M���z���㷨���������ֲ�����������Ӌ����̫���Ҳ��ײ��Ќ��F������һ�N��Ч��λ�Ùz�y������Ӳ�����F��Ŀǰ������Ҫ��Q�Ć��}�����IJ����m�ڶ��΄ղ���̎���ķօ^�g��������������ͬ�r����noc�W��Y���ľ����YԴ��̎�����ܶ��\��Ć��}����������ȫ��****�������Ч�ʡ�
1λ�Ùz�y��ϵ�y��ģ
1.1�D��λ�Ùz�yϵ�y�Ĕ��Wģ��
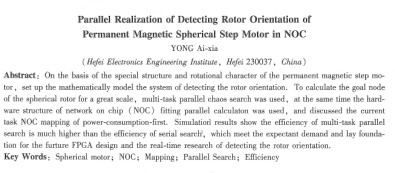
���D��λ���M�Йz�y����Ҫ�����S�C���a��ʽ����m���S�C�c���D�ӱ����úڡ��׃ɷN�ɫ�M�о��a�������Ϲ̶���96����늂�����������̖�o̎���������Ԃ������ķֱ��ʣ����������յ���̖�c�D�ӵķ�λ��һһ������
���������˞����S����ԭ�c����돽��l��늙C���D�ӺͶ���λ��ͬһ���档ivlatlab����ԓ늙Cģ�Ͷ��Ӿ�Ȧ�c��������λ����Dl��ʾ��
�������β���늄әC���Ъ��ص����S�Y�����ڌ����˿��gr3�У�����ԭ�c��׃�����е��D��׃�Q�������S�D��Ⱥ��ȺԪ���D�Ӿ��a���ÏV�x�W���Ǧ����¡��Ș�ӛ���ֽ����΅�����ȺԪ�ij˷e����ʾ����ϵ֮�g��׃�Q�Pϵ��
ʽ�У�rx(��)���@x�S�D�ǣ�ry(��)���@�µ�y�S�D�R�Ǧ�,rz(��)���@�µ�z�S�D�Ǧá�
���ڲ�������ⷽ���Ć��}��һ��ѿ��ܵĽ��ʾ���B���O��ϵ�y�ij�ʼ��B�����Dǰ�Ă�����ݔ����Ŀ�ˠ�B��δ֪λ�õĂ�����ݔ��cn���D�������c����֮�g�Ě�϶���Բ�Ӌ���J�����������Ҳ�������ϡ�
�o��һ��������ݔ������cn���O�ú�����
ʽ�У�n��������Ă��������}�]��****�Ľ⣬���96�������������2���ܵĽM�ϣ��D�Ӆs�Пo�F�������D�����}���H��׃�飺�ҵ�һ�����D�Ƕ�bo��ʹ��M�㣺
�`��espȡ�Q�ڂ������ķֱ��ʻ�ϵ�y���S�ľ��ȡ�
�D�����D�rĿ�˺����Ԅ��c�ǶȵĶ��S�Pϵ��D2��ʾ�����g�^����ƾ���׃�����īI[5]���nj������@һ�^��Ľ�����˔��WӋ�㡣
1.2���M�Ļ��烞���㷨
���烞���㷨���û���ı�v�Ԍ������B���뵽����׃���У��@�N�����������Ն���rЧ���^�͡����M�Ļ��烞���㷨����һ�N�m���ڶ�̎�������������ķ�����������׃����ȡֵ�������֞����ɂ��Ⱦ��^�g���ڸ����Ӆ^�g�Ȳ��������������������sС��
|