Ą═│╔▒ŠļŖäėų·┴”▐DŽ“ļŖÖC┐žųŲŽĄĮyĄ─īŹ¼F┼c┐žųŲ▓▀┬įā×╗»
├„ į┬Ż¼ äó╝╬├„Ż¼ ╔“Į©ą┬
(šŃĮŁ┤¾īWļŖÜŌ╣ż│╠īWį║Ż¼šŃĮŁ║╝ų▌310027)
š¬ę¬Ż║Ęų╬÷┴╦Ą═│╔▒ŠĪóĖ▀ąį─▄ļŖäėų·┴”▐DŽ“(EPS)ļŖÖC┐žųŲŽĄĮyĄ─īŹ¼F┼c│╔▒Š┐žųŲĘĮĘ©ĪŻ×ķ┴╦ā×╗»ŽĄĮyąį─▄Ż¼ī”▒╚蹊┐┴╦š²Žę├}īÆš{ųŲ(SPWM)Ż¼┐šķg╩Ė┴┐├}īÆš{ųŲ(SVPWM)║═╚²┤╬ųC▓©ūó╚ļ├}īÆš{ųŲ(THI-PWM)╚²ĘN▓╗═¼Ą─├}īÆš{ųŲ╝╝ągŻ¼ęį╝░ūį▀mæ¬PIš{╣Ø║═╣╠Č©ģóöĄPIš{╣Øā╔ĘN┐žųŲ╝╝ągĪŻįć“×ūC├„┴╦▓╔ė├ūį▀mæ¬PIš{╣Ø║═SVPWM╝╝ągĄ─Ą═│╔▒ŠEPS┐žųŲŽĄĮyŠ▀ėą┴╝║├Ą─▀\ąąąį─▄ĪŻ
ĻPµIį~Ż║ļŖäėų·┴”▐DŽ“Ż╗ą²▐Dūāē║Ų„Ż╗ūį▀mæ¬PI┐žųŲ
ųąłDĘųŅÉ╠¢Ż║TM 301Ż«2╬─½Iś╦ųŠ┤aŻ║A╬─š┬ŠÄ╠¢Ż║1673-6540(2010)0643027-04
0 ę² čį
ļŖäėų·┴”▐DŽ“(Electric Power SteeringŻ¼EPS)ŽĄĮyŠ▀ėą╣Ø╩ĪļŖ─▄ĪóĮYśŗ║åå╬Īó▀m║Ž─ŻēK╗»įOėŗ╔·«a╝░▐DŠž▌ö│÷┐╔┐žĄ╚ā׳cŻ¼į┌╬┤üĒÄū─Ļā╚īó┤¾┴┐╠µ┤·ę║ē║▐DŽ“ų·┴”ŽĄĮyĪŻĄ½╩ŪŻ¼į┌ļŖÖCįOėŗĪó┐žŽĄĮyįOėŗĪóŽĄĮyĘĆČ©ąį┼c┐╔┐┐ąį╝░│╔▒ŠĄ╚ĘĮ├µŻ¼▀ĆąĶę¬ū÷┤¾┴┐Ą─čą░l╣żū„ĪŻ
EPSŽĄĮyĄ─īŹ┘|╩Ūę╗éĆ╦┼Ę■ļŖÖC“īäėŽĄĮyŻ¼┐╔ęįĘų×ķā╔▓┐ĘųŻ║(1)Ė∙ō■▄ć╦┘Īó±{±éš▀į┌ĘĮŽ“▒P╔Ž╩®╝ėĄ─▐DŠžĄ╚Ė„ĘNģóöĄėŗ╦Ń│÷ļŖÖCĄ─▐D╦┘║═▐DŠžĮoČ©┴┐Ż╗(2)Ė∙ō■Ą┌ę╗▓┐ĘųĄ─ĮoČ©┴┐Ż¼┐žųŲļŖÖC▌ö│÷ŽÓæ¬Ą─▐D╦┘║═▐DŠž[1-2]ĪŻ▒Š╬─Ęų╬÷Ą┌Č■▓┐Ęų┐žųŲŽĄĮyĄ─įOėŗ┼cā×╗»ĪŻ
1 ┐žųŲŽĄĮyĄ─īŹ¼F┼c│╔▒Š┐žųŲ
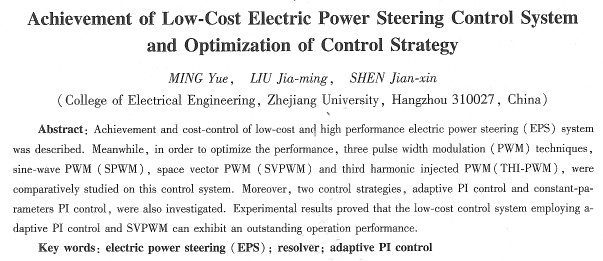
įōŽĄĮy▓╔ė├▒Ē├µ┤┼õō╩Įļ[śOė└┤┼═¼▓ĮļŖÖC(SalientĪ¬Pole Pel3~mnent Magnet Synonous MoĪ¬torŻ¼SPMSM)ū„×ķ“īäėļŖÖCŻ¼▓╔ė├▐D╦┘ĪóļŖ┴„ļpķ]ŁhĄ─┤┼ł÷Č©Ž“┐žųŲĘĮĘ©ĪŻį┌dĪ¬qū°ś╦ŽĄŽ┬Ż¼═©▀^Ęųäe┐žųŲļŖÖCļŖ┴„Ą─id║═iqĘų┴┐Ż¼┐╔ęįų▒Įė┐žųŲļŖÖCĄ─┤┼ł÷║═▐DŠžŻ¼īŹ¼F┼cų▒┴„ļŖÖCŅÉ╦ŲĄ─äėæBąį─▄ĪŻįōŽĄĮy×ķīŹ¼F****▐DŠž┐žųŲŻ¼▓╔ė├id=0Ą─┐žųŲĘĮĘ©Ż¼Ųõ┐žųŲ┐“łD╚ńłD1╦∙╩ŠĪŻ
ļŖÖC┐žųŲŲ„Ęų×ķöĄūųą┼╠¢╠Ä└ĒŲ„(DigitalSignal ProcessingŻ¼DSP)┐žųŲå╬į¬Īó╬╗ų├Öz£yå╬į¬Īó“īäėå╬į¬ĪóļŖ┴„▓╔śėå╬į¬╦─▓┐ĘųĪŻŲõųąDSP┐žųŲå╬į¬▓╔ė├Freescale╣½╦ŠĄ─1 6╬╗╗ņ║Žą═DSP
56F8323Ż¼Ųõ▀\╦Ń╦┘Č╚┐ņĪó═ŌįOžSĖ╗Īó═Ōć·ļŖ┬Ę║åå╬Īó│╔▒ŠĄ═Ż¼▀m║ŽĄ═│╔▒ŠEPsļŖÖC┐žųŲŽĄĮyæ¬ė├Ż¼ę▓┐╔ØMūŃŲ¹▄ćļŖūė═©ą┼║═ĘĆČ©ąįĄ─ę¬Ū¾ĪŻ
╬╗ų├Öz£yå╬į¬ė╔ą²▐Dūāē║Ų„Īóą²▐Dūāē║Ų„ę╗öĄūų▐DōQ(RDc)ļŖ┬ĘĮM│╔ĪŻŽÓī”ė┌į÷┴┐╩Į╣ŌļŖŠÄ┤aŲ„Ż¼įōŽĄĮyŠ▀ėą┐╣ÖCąĄø_ō¶║═┐╣£žČ╚ĪóرČ╚ūā╗»Ą╚ā׳cŻ¼ŪęĮø▀^RDcĮŌ╦Ń│÷Ą─╩Ū▐Dūė****╬╗ų├Ż¼┤¾┤¾║å╗»┴╦DsPī”ļŖĮŪČ╚Ą─ėŗ╦ŃŻ╗┴Ē═ŌŻ¼ą²▐Dūāē║Ų„ŽĄĮy│╔▒Š▀hĄ═ė┌ŽÓ═¼Š½Č╚Ą─į÷┴┐╩Į╣ŌļŖŠÄ┤aŲ„ĪŻĄ½RDc×ķ─ŻöĄ╣▓┤µąŠŲ¼Ż¼═Ōć·ļŖ┬ĘĄ─įOėŗ║═š{įć▌^×ķÅ═ļs[3]ĪŻ
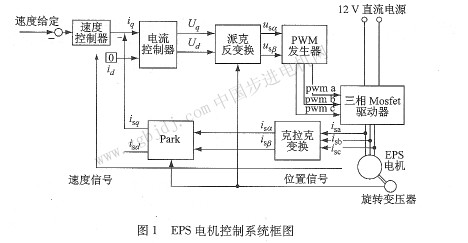
╣”┬╩“īäėå╬į¬ė╔6éĆ┤¾╣”┬╩M0sFETśŗ│╔ĪŻė╔ė┌╗¶Ā¢ą¦æ¬ļŖ┴„é„ĖąŲ„│╔▒Š▀^Ė▀Ż¼ę“┤╦į┌Ž┬ś“▒█Ą─M0sFETŽ┬Č╦Ė„┤«Įėę╗éĆ┼c┐žųŲ▓┐Ęų╣▓ĄžąĪūĶųĄĄ─Š½├▄╣”┬╩ļŖūĶŻ¼ū„×ķļŖ┴„▓╔śėļŖūĶŻ¼═©▀^ī”ļŖūĶā╔Č╦Ą─ļŖē║▀MąąAD▓╔śėėŗ╦ŃĄ├ĄĮļŖÖCĄ─ŽÓļŖ┴„ĪŻė╔ė┌ų╗ėąŽ┬╣▄ī¦═©ĢrļŖ┴„▓┼Ģ■═©▀^▓╔śėļŖūĶŻ¼ę“┤╦įōŽĄĮy▓╔ė├═¼▓Į▓╔śė─Ż╩ĮŻ¼╝┤į┌Ž┬╣▄ī¦═©Ą─ųąķgĢr┐╠ŲäėAD▐DōQĪŻ╚ń╣¹─│ę╗ŽÓŽ┬╣▄ī¦═©Ģrķg▀^Č╠Ż¼Ģ■ę²ŲļŖ┴„▓╔śė▓╗£╩┤_╗“š▀¤oĘ©▓╔śėĄĮļŖ┴„ųĄŻ¼ätąĶĖ∙ō■¤oųąŠĆ╚²ŽÓŽĄĮyųą╚²ŽÓļŖ┴„ų«║═Ą╚ė┌┴ŃĄ─╠žąįŻ¼═©▀^┴Ē═Ōā╔ŽÓėŗ╦ŃįōŽÓļŖ┴„ĪŻļŖÖCĄ─īŹļHŽÓļŖ┴„┼cĮø▀^═¼▓Į▓╔śė║═ėŗ╦ŃĄ├ĄĮĄ─ŽÓļŖ┴„ųĄĄ─▓©ą╬ī”▒╚╚ńłD2╦∙╩ŠŻ¼┐╔ęŖėŗ╦ŃĄ├ĄĮĄ─ļŖ┴„ęÓ╝┤įōŽĄĮyĄ─ļŖ┴„Ę┤üŻ¼┐╔ęį║▄║├ĄžĘ┤ė│īŹļHļŖ┴„ĪŻ
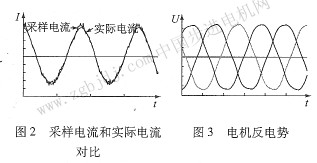
įōŽĄĮy▓╔ė├Ą─ļŖÖC╩Ūę╗┼_490 wĄ─9Ż»6ĮYśŗĄ─PMSMŻ¼ŲõŅ~Č©ų▒┴„─ĖŠĆ“īäėļŖē║╩Ū12 vŻ¼Ņ~Č©▐D╦┘×ķ1100 rŻ»minŻ¼Ņ~Č©▐DŠž×ķ4.24 NĪżmĪŻļŖÖCĄ─ŽÓĘ┤ļŖä▌╚ńłD3╦∙╩ŠŻ¼┐╔ęį┐┤│÷ļŖÖCĄ─ŽÓĘ┤
ļŖä▌▓ó▓╗╩Ū╝āš²Žę▓©Ż¼┤µį┌ę╗Č©Ą─ųC▓©Ęų┴┐Ż¼▀@╩Ūė╔▐Dūėė└┤┼┤┼Łh▀MąąČÓŽÓš²Žę▓©│õ┤┼Ģr▓ó▓╗Š½┤_╦∙ī¦ų┬Ą─ĪŻ
2 SPWMŻ«SVPWM║═THIĪ¬PWMĄ─ī”▒╚蹊┐
š²Žę├}īÆš{ųŲ(sinĪ¬wave Pulse wid│÷M0duĪ¬lationŻ¼sPwM)Īó┐šå¢╩Ė┴┐├}īÆš{ųŲ(space vectorPulse┌Ńdth ModulationŻ¼sVPwM)Īó╚²┤╬ųC▓©ūó╚ļ├}īÆš{ųŲ(_rhlrd Hannonic Iniected Pulse widthM0dulatrnnŻ¼T HlĪ¬PwM)╩Ū¼FļAČ╬▒╚▌^│ŻęŖĄ─├}īÆš{ųŲ(Pulse wĪżč¬M0dulaTionŻ¼PwM)╝╝ągŻ¼╚²š▀Ė„ėą╠ž³cĪŻ
|