����늙C�����νӷ��r���g ʸ���}���{�Ƽ��g����
�S�B��1��������1�������1�����첨2
(1 ̫ԭ������W��ɽ��̫ԭ030024��2ꖳLJ��H�l�؟������˾��ɽ���x��048102)
ժҪ�������ˮ���늙C�����νӷ����ÿ��gʸ���}���{��(SVPWM)���g�r������늉��Ն�ʸ���Ĵ�С�c��λ�������Y��������늙C��Y���c���ӕr����׃�����f���_�P��B��ͮ�ɵ�늉����gʸ���Ĵ�С����λ������ͬ���ڴ˻��A�Ͻo���ˡ��ӷ��r�ȅ^�Ą��ּ��ȅ^̖�Ĵ_��������
�P�I�~���}���{�ƣ��_�P��B������늙C
�ЈD���̖��TM 343�īI��־�a��A���¾�̖��1673��6540(2010)064)031��04
0 �� ��
�ڸ�����ȫ���ֿ��ƵĽ����ŷ���ϵ�y�У�ͨ�����Ô����}���{��(Pulse Width Modula��tion��P~XeM)������������y��ģ�MPWM����������F�Ŀ��gʸ���}���{��(Space Vector PulseWidth Modulation��SVPWM)���g�c���y�������}���{��(Sin��Wave Pulse width Modulation��sPwM)���g��ȣ���ֱ��늉������ʵȷ��棬����������@�ă��ݣ������늙C�����ϵõ��ˏV�����á����磬�殐��늙Cʸ������ϵ�y�У�������ҪӋ�������늉��Ħ����·���������SVPWM���g�_����Ҫʩ�ӵĻ���늉����gʸ�����Ķ��_����׃�����_�P��B�����ǣ�SVPWM���g�nj�늙C�Ŀ�Ŀ늉��M���{�Ƶġ������������ڮ���늙C����Y�͡��ӷ��ɷN��r�£���׃����ͬ���_�P��B�ϳɵĻ���늉����gʸ���Ĵ�С����λ������ͬ���������늙C���@�M�ӷ��M���Д��������ͬ���{�Ʒ��������������e�`�Ŀ��ƽY�����īI[1-5]�o�����{���㷨������늙CY�ӷ������ķ����ˡ��ӷ���r�£���׃����ͬ�_�P��B���������gʸ���ķ�ֵ����λ���Լ��ȅ^�Ą��ַ��������cY�ӷ�����r�M���ˌ��ȡ�
1 늙CY���c���ӵĿ��gʸ���ϳ�
1��1��׃�����_�P��B
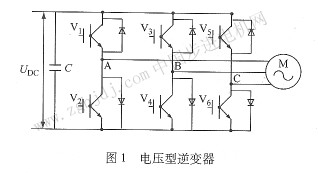
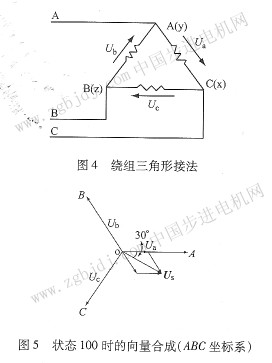
�D1�ǵ��͵�����늉��͘�ʽ��׃�·���D��V1��V6��6��ȫ�����_�P������ͬһ��۵��_�P�������෴���_�P��B���O�Ϙ�ی�ͨ��l����ی�ͨ��0���t��׃���Ĺ�����B����8�N���քe��000��100��110��010����1��001��101��11�����У�000�c111ʹ��׃��ݔ��늉����㣬�Q����ʸ��������6�N����6��������늉����gʸ�������@�M����Y�����ӷ��ɷN��r�£������Ĵ�С����λ��ͬ���������¡�
1��2늙C�@�MY�ӷ����늉����gʸ�����ȅ^����
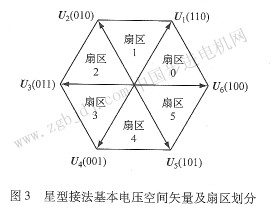
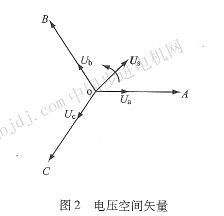
���x����늉�ʸ���ڸ����@�M���S������D2��ʾ��6������늉����gʸ���ķ�ֵ����λ���1��ʾ����λ�ֲ����ȅ^������D3��ʾ��
��1�У�Ua��Ub��Uc�քe��A��B��C�����@�M 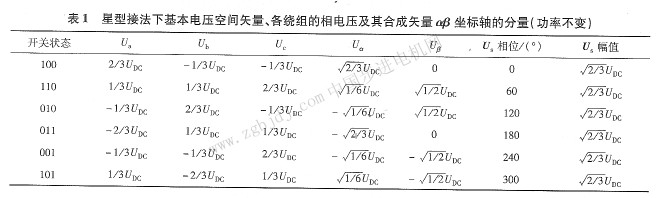 1��3늙C�@�M���r��늉����gʸ���ϳɼ��ȅ^����
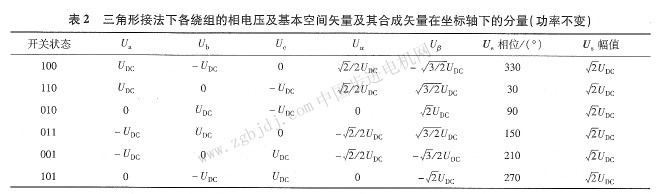
�D4���@�M���ӷ��r�ĽӾ�ʾ��D����̖����ĸ��ʾ�@�Mβ�ˡ��D5��ʾ�_�P��B��100�r���gʸ���ĺϳ���r�������D1��V1��V4��V6��ͨ��V2��V3��V5�P�࣬����늉�Ua��Uc��Ub������ֱ��ĸ����ؓ�O�քe��Udc-Udc��0����ǰ�����x��ȡ����늉��Ն�ʸ���������@�M���S���ϣ��t�ϳ�ʸ��Us=3Udce.
����늉�(_4Bc����ϵ�Ĕ�ֵ)��Ua��Ub�Ǹ��_�P��B�����Ļ���늉�ʸ���ֽۡ����ϵ�ϵķ�����Us��ϳɵĻ���늉����gʸ���Ĵ�С��Us��λ��ʾ����늉����gʸ������λ��
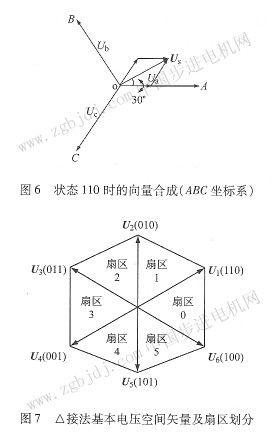
�D6��ʾ�����_�P��B��1 10�r���gʸ���Ĵ�С�c��λ������ͬ�ӵķ����ɵ��������gʸ���Ĵ�С����λ(Ҋ��2�͈D7)�����ȈD3��7����1��2��Ҋ���ɷN�ӷ��r6������늉��Ն�ʸ������λ��ͬ�����ӷ���Y�ӷ��r�ϳɵĿՆ�ʸ����λ����n��6(��rᘞ�������)����ǰ�߷�ֵ��
2 ���ӷ��ȅ^���ּ��ȅ^̖�_��
|