�����z���W�j�ij���늙C�D�ٿ���ϵ�y
� �g1, ʷ����2
(1��h����������M�b���о�����������h430064��2���ϿƼ���W���������471003)
ժҪ����Bһ�N����늙C(USM)���m�����Ʋ��ԣ�ϵ�y�����p�]�h���ƣ��ȭhͨ�^�����O늉��M�вɘӡ��Д࣬�a��USM�C���l�ʵ�Ư�ƣ���h���ÄӑB�f�w���j�����{�������ӽ�׃늉�����λ����F�D�ٵ����m�����ơ�DRNN�ĽY���ͳ�ʼ����ͨ�^����f�A�z���㷨�x��ӖI���@�á�ԇ�Y��������ԓ����ϵ�y�����^�ߵĿ��ƾ��Ⱥ��^�õķ����ԡ��P�I�~������늙C�����m�����ƣ��z���W�j�ЈD���̖��TM 301 2�īI��־�a��A���¾�̖
0 ����
����늙C(Uhrasonic Motor��USM)��һ�N�����طN늙C���ڹ��I���ơ����܃x�����k���Ԅӻ����I�������V韵đ���ǰ��[1]�����ǣ�USM���Ї��صķǾ��ԡ��r׃�Ժ͏���ϣ����W��ģ�dz����y������߀�]�о��_�Ĕ��Wģ�ͣ����y����ه���،��Wģ�͵Ŀ��Ʋ��Ժ��y���䌍ʩ��Ч���ơ����ӑB�f�w�W�j(Dynamical ReculTentNeural Networks��DRNN)������USM�����m���ٶȿ��ƣ����a_�V���������IJ��㡣���û���f�A�z���㷨���W�j�ĽY���ͳ�ʼ�����M���x����������ͨ�^�ݶ��½����W�j�����M���ھ��{����ԇ�Y��������ԓ�������H���п����`��m���ԏ��ă��c��߀�����^�ߵĿ��ƾ��Ⱥ������ԡ�
l usM�ӿ���ϵ�y
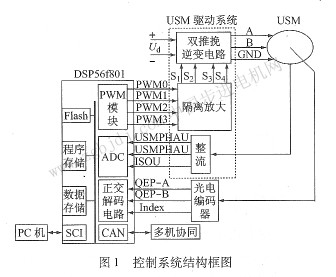
USM���Ã������һ���l�ʡ���ֵ����λ�������늉����ӣ�������늙C�����ij����ԣ�����ʹ�÷���늉���ֱ���ӡ����IJ����{���{�ٷ�����ʹ��늉�����λ����һ90����+90���B�m���{һ�xȡDSP56F801���õ��}������(PulseWidth Modulation��PWM)ģ�K��������̖�l������ͨ�^��PWM���ڼĴ���(PWMCM)��Ӌ��ģֵ�Ĵ���(PWMVAL)��ֵ�����Ɍ��F��늉��l�ʺ���λ���韹�������̖�����x�Ŵ�����������׃�·��׃�������Ƀ���߉������l����늉�����USM�������a��USM���C���l��ư�ƣ��茦USM���O����늉��ɘӣ����ɘ�ֵ�c�O��ֵ�M�б��^����С���O��ֵ�t�pСPWMCM��ֵ�������ڵ��ڄt���ֲ�׃���Ը�ۙ�C���l�ʵ�Ư�ơ��鱣�C�y�ٵľ��ȣ����ù�늾��a������
�y�ن�Ԫ������Ӷ��r���Ȳ���������a��Ԫ���Ɍ��F�D�ټ��D�ǵĜy�㡣����ϵ�y�Y����D��D1��ʾ��
2 USM�������R���m������ϵ�y
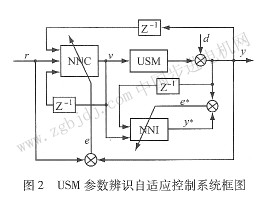
����DRNN�܉F�߶ȏ��s�ķǾ��ԄӑBӳ�䣬�־����ԌW�������m�ȵ��������ʌ����������m��������(DRNNC)����ݔ�˞�o���D��r(^)��늙C��һ�r�̌��H�D��y(k��1)��NNc��һ�r��ݔ���Ŀ�����Up(kһ1)��ݔ���������̖Up(k)�����{��������늉�����λ������������R�ı��R��(DRNM)ݔ�˞錍�Hݔ��usM�Ŀ�����Up(k)��늙C��һ�r�̵Č��H�D��y(k��1)��ݔ�����A�y�D��y(k)������y����y����DRNNc���ھ�Ӗ���ṩ������uSM�������R���m������ϵ�y��D��D2��ʾ��
3 DRNN����Ӗ������
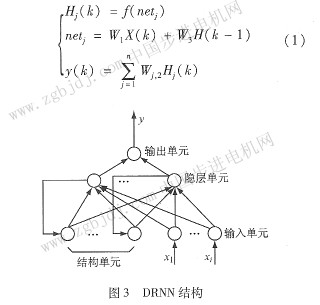
DRNN�Y����D3��ʾ��������ݔ��ӡ��[�ӡ�ݔ������߀��һ������ĽY����Ԫ���Á�ӛ���[�ӆ�Ԫ��ǰ�r�̵�ݔ��ֵ���Y����Ԫ�ڕr�̵�ݔ������[����k��l�r�̵�ݔ���������˜p���ھ��W���r�g����ߌ��r�ݣ��Y����Ԫ��ݔ���Hݔ�뵽�������[�ӆ�Ԫ���O�W�jݔ��������x��ݔ���Ԫ�c�[�ӆ�Ԫ�g���B�ә�ֵ��ꇞ�W1���[�ӆ�Ԫ�cݔ����Ԫ�g���B�ә�ֵ������W2�Y����Ԫ�c�[�ӆ�Ԫ�g���B�ә�ֵ������W3���[�Ӽ������l�S(��̎�x��1��(1+e-x))���[�ӵ�j����Ԫݔ����Hj���t�W�j��ݔ��ݔȽ�Pϵ��
3��1�x��Ӗ��
�x��Ӗ���Ęӱ���ͨ�^ԇ�ķ����@�á�NNc��ݔ��ӱ�������Xci={r(k)��y(k-1)��
Up(k-1)}��ݔ���ӱ�ʸ����Yci={Up(k)}��Up(k)��ݔ��uSM�ă��ཻ��늉�����λ�����k�r��늙C�D��ͨ�^�錦�����D����λ����D��늉���ֵ�����@�á�NNI��ݔ��ӱ�������Xii={Up(k-1)��yf(kһ1)}��ݔ���ӱ�������Yi={y(k)}��y(k)���A�y�D�١�
���y�����㷨���ھW�j�Y����֪�Ļ��A�ό��W�j�����M�Ќ������o�����W�j�Y���M�Ѓ��������IJ��û���f�A�z���㷨���W�j�Y���ͅ���һ���������f�A�z���㷨�Č����^ |