ŠC║Ž┤¼ś“ČÓį┤ī¦║Įą┼Žó╚┌║Ž╝╝ąg蹊┐
Ēnä”▌x112Ż¼įSµé┴š1Ż¼╩µ¢|┴┴2
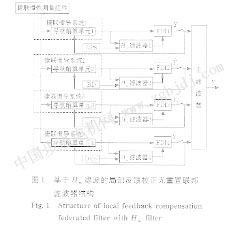
Ż©1╠ņĮ“┤¾īWļŖÜŌ┼cūįäė╗»╣ż│╠īWį║Ż¼╠ņĮ“300072,2╠ņĮ“║Į║ŻāxŲ„蹊┐╦∙Ż¼╠ņĮ“300131Ż®
š¬ ꬯║į┌┼õéõ┴╦Į▌┬ōæTī¦ĪócpsĪó▒▒ČĘĪóėŗ│╠āx║═┴_╠mcĄ╚ČÓéĆī¦║ĮįOéõĄ─ŠC║Ž┤¼ś“ī¦║ĮŽĄĮyųąŻ¼ßśī”│ŻęÄĄ─¤oųžų├┬ō░Ņ×V▓©Ų„ķLĢrķgī¦║ĮĢ■ę²Ųī¦║ĮŠ½Č╚ĮĄĄ═║═×V▓©Ų„░l╔óĄ─å¢Ņ}Ż¼ęįÅBīŹļHæ¬ė├ųą┐©Ā¢┬³×V▓©ī”ŽĄĮyįļ┬Ģ║═┴┐£yįļ┬ĢĮyėŗ╠žąįę¬Ū¾Ą─ŠųŽ▐ąįŻ¼▓╔ė├┴╦Šų▓┐Ę┤üąŻš²Ą─¤oųžų├┬ō░Ņ×V▓©ĮYśŗŻ¼įOėŗ┴╦╗∙ė┌╚šĪŻ×V▓©Ą─Šų▓┐Ę┤üąŻš²¤oųžų├┬ō░Ņ×V▓©Ų„Ż¼▓óīóŲõæ¬ė├ė┌ŠC║Ž┤¼ś“ČÓį┤ī¦║Įą┼Žó╚┌║ŽŽĄĮyųąĪŻĘ┬šµĘų╬÷▒Ē├„Ż¼╗∙ė┌hĪŻ×V▓©Ą─Šų▓┐Ę┤üąŻš²¤oųžų├┬ō░Ņ×V▓©Ų„ī”║ĮŽ“ĮŪ║═╬╗ų├Ą─╣└ėŗŠ½Č╚Č╝Ė▀ė┌│ŻęÄĄ─¤oųžų├┬ō░Ņ×V▓©Ų„Ż¼Š▀ėąĖ³║├Ą─īŹļHæ¬ė├ārųĄĪŻ
ĻPµIį~Ż║ŠC║Ž┤¼ś“Ż╗hŻ╗×V▓©Ż╗ą┼Žó╚┌║ŽŻ╗┬ō░Ņ×V▓©
ųąłDĘųŅÉ╠¢Ż║tp 273 ╬─½Iś╦ūR┤aŻ╗a
1ę²čį
«öŪ░┤¼▓░ī¦║ĮŽĄĮyęčĮøÅ─å╬╝ā╠ß╣®ī¦║ĮöĄō■░lš╣ĄĮ═©▀^ŠWĮj╝╝ąg┼cą┼Žó╚┌║Ž╝╝ąg╠ß╣®ČÓśė╗»Ą─ī¦║Į─Ż╩Į║═┐žųŲ╣”─▄Ż¼ą╬│╔┴╦┤¼▓░ī¦║Į┼c±{┐ž╣”─▄ę╗¾w╗»Ą─ŠC║Ž┤¼ś“ŽĄĮyĪŻ
─┐Ū░Ė„ĘNī¦║ĮČ©╬╗įOéõ┼c╝╝ągĄ─░lš╣ęč╗∙▒Š┌ģė┌ĘĆČ©Ż¼║▄ļy┤¾Ę∙Č╚Ąž╠ßĖ▀─│ĘNå╬ę╗ī¦║ĮČ©╬╗įOéõĄ─Š½Č╚ĪŻČ°▓╔ė├ČÓé„ĖąŲ„ą┼Žó╚┌║Ž╝╝ąg╚ĪķLčaČ╠ŠC║Ž░lō]Ė„ĘNī¦║ĮįOéõ╠ž³cŻ¼┐╔╠ßĖ▀ī¦║ĮŽĄĮyĄ─š¹¾wŠ½Č╚║═┐╔┐┐ąįŻ¼ą¦╣¹╩«Ęų├„’@ĪŻ
─┐Ū░ÅVĘ║▓╔ė├╝»ųą┐©Ā¢┬³×V▓©Ų„╗“╗∙ė┌┐©Ā¢┬³×V▓©Ą─┬ō░Ņ×V▓©Ų„üĒ▀Mąąą┼ŽóĄ─╚┌║Ž╠Ä└ĒŻ¼Ū░š▀┤µį┌ų°īŹĢrąį║═╚▌Õeąį▓ŅĄ─å¢Ņ}Ż¼║¾š▀×ķ┴╦▒ŻūC┴╝║├Ą─╚▌Õeąį─▄Č°▓╗ī”Ė„ūėŽĄĮy▀MąąąŻš²Å─Č°ōp╩¦┴╦ŽĄĮyĄ─Š½Č╚ĪŻ▒Š╬─▓╔ė├Šų▓┐Ę┤üąŻš²¤oųžų├┬ō░Ņ×V▓©Ų„ĮYśŗŻ¼═¼ĢrīóhĪ▐×V▓©æ¬ė├ė┌ŲõųąŻ¼śŗ│╔╗∙ė┌hĪ▐×V▓©Ą─Šų▓┐Ę┤üąŻš²¤oųžų├┬ō░Ņ×V▓©Ų„Ż¼įō×V▓©Ų„▒Ż│ų┴╦ŽĄĮy╚▌ÕeąįŻ¼═¼ĢrŠ▀ėąĖ³Ė▀Ą─Š½Č╚║═Ė³║├Ą─¶ö░¶ąįĪŻ
2╗∙ė┌hĪ▐×V▓©Ą─Šų▓┐Ę┤üąŻš²¤oųžų├┬ō░Ņ×V▓©Ų„ĮYśŗ
Į▌┬ōæTī¦ŽĄĮy( sins)▌^Ė▀Ą─ąįār▒╚Ż¼┐╔ū„×ķ┤¼▓░Ą─╗∙▒Šī¦║ĮŽĄĮyŻ╗═¼Ģr┼õéõcpsĪó▒▒ČĘ(bd)ĪóČÓŲš└šėŗ│╠āx( dvs)║═┴_╠mc(loran c)Ą╚ī¦║ĮāxŲ„ū„×ķ▌oų·ī¦║ĮŽĄĮyŻ¼śŗ│╔Ą╬ūŃ║Įąąę¬Ū¾Ą─Ė▀ąįār▒╚┤¼▓░ī¦║ĮŽĄĮyĪŻ
Į▌┬ōæTī¦ŽĄĮy( sins) ┐╔ęį┐┤ū„╩Ūė╔Į▌┬ōæTąį£y┴┐ĮM╝■(imu)║═ī¦║ĮĮŌ╦Ńå╬į¬(nc)śŗ│╔Ą─ĪŻ╗∙ė┌hĪ▐×V▓©Ą─Šų▓┐Ę┤üąŻš²¤oųžų├┬ō░Ņ×V▓©Ų„īóhĪ▐┼cncęĢ×ķsinsĄ─2éĆĘų┴óĮM│╔▓┐ĘųŻ¼š¹éĆ×V▓©Ų„ųąėąę╗éĆĮ▌┬ōæTąį£y┴┐ĮM╝■║═╚¶Ė╔éĆī¦║ĮĮŌ╦Ńå╬į¬Ż¼▓óŪęīóĮ▌┬ōæTąį£y┴┐å╬į¬ū„×ķ╣½╣▓ģó┐╝ŽĄĮyĪŻ├┐ę╗éĆī¦║ĮūėŽĄĮyĄ─▌ö│÷Ęųäe┼cę╗éĆī¦║ĮĮŌ╦Ńå╬į¬ŽÓæ¬Ą─▌ö│÷ę╗Ųśŗ│╔ūė×V▓©Ų„Ą─┴┐£yŻ¼├┐éĆūė×V▓©Ų„Ą─hĪ▐×V▓©▀\╦ѬÜ┴óĄž▓óąą▀\ąąŻ¼▓óŪę├┐éĆūė×V▓©Ų„Č╝▓╔ė├Ę┤üąŻš²ĘĮ╩Įī”Ė„ūįī¦║ĮĮŌ╦Ńå╬į¬Ą─š`▓Ņ▀Mąąą▐š²ĪŻĖ„éĆĘų┴óĄ─Įø▀^Ę┤üąŻš²Ą─ī¦║ĮĮŌ╦Ńå╬į¬▌ö│÷Ą─ī¦║ĮģóöĄ╩ŪŠų▓┐****Ą─Ż¼īó▀@ą®Šų▓┐****Ą─ī¦║ĮģóöĄ▌ö╚ļĄĮų„×V▓©Ų„ųąŻ¼═©▀^ų„×V▓©Ų„Ą├ĄĮī¦║ĮģóöĄĄ─╚½Šų╣└ėŗĪŻ×V▓©Ų„ĮYśŗŻ¼╚ńłD1╦∙╩ŠĪŻ
╗∙ė┌hĪ▐×V▓©Ą─Šų▓┐Ę┤üąŻš²¤oųžų├┬ō░Ņ×V▓©Ų„╩Ū═©▀^ī”ī¦║ĮģóöĄŽ“┴┐Ą─Šų▓┐****╣└ėŗ▀Mąąą┼Žó╚┌║ŽŻ¼Å─Č°ų▒ĮėĄ├ĄĮī¦║ĮģóöĄŽ“┴┐Ą─╚½ų▄╣└ėŗĪŻ╦³┼ccarlson╠ß│÷Ą─¤oųžų├┬ō░Ņ×V▓©Ų„į┌½@Ą├ī¦║ĮģóöĄĄ─╚½Šų╣└ėŗ═ŠÅĮ╔Žėą╦∙▓Ņ«ÉŻ¼Ą½ā╔š▀Č╝╩Ūį┌Ą├ĄĮŠų▓┐****╣└ėŗĄ─Śl╝■Ž┬═©▀^****╝ėÖÓūŅąĪČ■│╦╣└ėŗüĒĄ├ĄĮ╚½Šų╣└ėŗĪŻė╔ė┌ā╔š▀Ą├ĄĮŠų▓┐****╣└ėŗ╦∙ė├Ą─┴┐£yą┼ŽóŽÓ═¼Ż¼ŪęŠų▓┐****╣└ėŗ║═╚½Šųą┼Žó╚┌║ŽĄ─****ąį£╩ätŽÓ═¼Ż¼ę“┤╦į┌ŽĄĮy─Żą═£╩┤_Ą─ŪķørŽ┬Ż¼╗∙ė┌hĪ▐×V▓©Ą─Šų▓┐Ę┤üąŻš²¤oųžų├┬ō░Ņ×V▓©Ų„║═¤oųžų├┬ō░Ņ×V▓©Ų„╦∙Ą├ĄĮĄ─ī¦║ĮģóöĄĄ─╚½Šų╣└ėŗĄ─Š½Č╚æ¬įō╩ŪŽÓ«öĄ─ĪŻ╚╗Č°ė╔ė┌ūėŽĄĮyĄ─ĀŅĘĮ
│╠Š∙×ķ▓╔ė├ę╗ļAĮ³╦ŲĄ─š`▓Ņ─Żą═Ż¼╣╩¤oųžų├┬ō░Ņ×V▓©Ų„ųąūėŽĄĮyĄ─ĀŅæBĘĮ│╠īóĢ■ļSĢrķgĄ─═ŲęŲČ°┌ģė┌▓╗£╩┤_Ż¼Å─Č°╩╣Ą├ūė×V▓©Ų„Ą├ĄĮĄ─Šų▓┐****╣└ėŗĄ─Š½Č╚Ž┬ĮĄĪŻ═¼ĢrŻ¼ė╔ė┌┐©Ā¢┬³×V▓©ę¬Ū¾ŽĄĮyįļ┬Ģ║═┴┐£yįļ┬Ģ×ķ░ūįļ┬ĢŻ¼┐╝æ]ĄĮį┌║▄ČÓīŹļHæ¬ė├ųąŽĄĮyįļ┬Ģ║═┴┐£yįļ┬Ģ▓╗ę╗Č©×ķ░ūįļ┬ĢŻ¼╗“š▀─Żą═Į©─Ż▒╚▌^└¦ļy╗“╦∙Į©─Żą═┤µį┌║▄┤¾Ą─š`▓ŅŻ¼┤╦ĢrŪęĪŻ×V▓©Ą─¶ö░¶ąįīóĄ├ĄĮ│õĘųĄ─¾w¼FŻ¼ę“┤╦╗∙ė┌hĪ▐×V▓©Ą─▓┐Ę┤üąŻš²¤oųžų├┬ō░Ņ×V▓©Ų„į┌▒ŻūCŽĄĮyĄ─╚▌Õeąį─▄Ą─═¼ĢrŠ▀ėąĖ³Ė▀Ą─Š½Č╚║═¶ö░¶ąįĪŻ
3╗∙ė┌hĪ▐×V▓©Ą─Šų▓┐Ę┤üąŻš²¤oųž |



