һ�N���M��camshift/kalman�\��Ŀ�˸�ۙ�㷨
��ʿ�s�������G
��������ӿƼ���W�Ԅӻ��о������㽭����310018��
ժ Ҫ��ᘌ�Ŀ�˸�ۙ�е�Ŀ���ړ����Gʧ����r�������һ�N���M�Ļ��ڿ��g߅������
ֱ��Ŀ��camshift/kalman��ۙ�㷨�����ȣ����ÿ��g߅���ݶȷ�������ƥ����Ϣ��ͬ�r���m������ÿ���е�ƥ��ģ�壬��ʹ��kalman�V�������\��Ŀ�˵�λ���M���A�y���£��Կ˷�Ŀ���ړ���r�����ĸɔ_����������ԓ�㷨�܉��^��̎��Ŀ���ړ���r�����F(xi��n)�\��Ŀ�˵ĸ߾��ȸ�ۙ��
�P�I�~��߅������ֱ���D��camshift��Ŀ�˸�ۙ
�ЈD���̖��tp 27 �īI���R�a��a
1����
�\�����w��Ŀ�˸�ۙ�ǙC��ҕ�X�о��I��ğ��c֮һ���S���W���������NĿ�˸�ۙ�㷨�������P�đ��á�meanshift�㷨����o����(sh��)������ƥ��ă�(y��u)Խ�Ա��V�����õ�Ŀ�˸�ۙ�I����������funkunage������������õ�ģʽ�R�e�У�cheng�������뵽Ӌ��Cҕ�X�I�����䑪����Ŀ�˸�ۙ������meanshift�o���ڸ�ۙ�^���Ќ�Ŀ��ģ���M�и��£���Ŀ�˳ߴ�׃�����ؕr�����¸�ۙ�����_���������GʧĿ�ˡ����˽�Q����}��bradskj[4]�����camshift�㷨���@��һ�N��meanshift�㷨�Uչ���B�m(x��)�D�����ж��õ����\�Ӹ�ۙ�㷨���������Ԅ��{(di��o)��(ji��)���ڴ�С���m��Ŀ���ڈD���еijߴ�׃��������һ���̶��Ͻ�Q�������\��Ŀ�˵���׃��ɵĸ�ۙ�����_���}���īI[5]��ͨ�^��ͨ���Uչ�������ڽ�Q����Ŀ�˼��ٶȶ������Ŀ��˲�g�Gʧ���}����������camshift�㷨�ǃH����ɫ����Ϣ����Ŀ��ֱ���Dģ���M�и�ۙ��ʹ���������ɫ����ĸɔ_��Ӱ푣���Ŀ���c�����ɫ�ӽ���Ŀ�˱��ړ��r���㷨��Ч����̫���롣
���Ļ���camshift�㷨�����һ�N���M��camshift/kalman�\��Ŀ�˸�ۙ�㷨��ԓ�㷨����߅������ֱ���D�����ɫֱ���D���Mһ������Ŀ��ģ�͵Ŀ��g��Ϣ���Y��kalman�V�������\��Ŀ�˵Ġ�B(t��i)�M���A�y��н�����Ҍ�ÿ���е�ģ���ȡ���m�����²��ԡ�����������ķ��������^���Ŀ��ɔ_�ԣ��Ҿ����^�õľ��_�Ժͷ�(w��n)���ԡ�
2���g߅������ֱ���D
1)߅���z�y �D��߅�����Կ��������ض�����ͷ�ֵ�������c������[6]�����ҶȈD��g�M��߅���z�y���քeʹ��sobel���ӵăɂ�ģ�壺
�cg�M�о��e�\�㣬�õ�ˮƽ�ʹ�ֱ�����߅���D��g���tg����һ������̎���ݶȷ�ֵ�ͷ���քe��ʾ��
ʽ�У�gij1��g1��gij2��g2�քe����gij��g��i��j�քe�����،������Д�(sh��)���Д�(sh��)��o��d(gij)��180�ȡ�
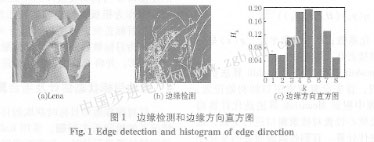
2)���g߅������ֱ���D ���˽y(t��ng)Ӌ��(sh��)��(j��)�Ա�Ӌ��ֱ���D����d(gij)������n�ȷ֣�n��ֵ�ɸ���(j��)��Ҫ�xȡ��ȡֵԽ��Խ�ߣ�Ӌ����ҲԽ����ȡn=8�����_�����܈D��s�ŵ�Ӱ푣���Ҫ��߅������ֱ���D�wһ�����t߅������ֱ
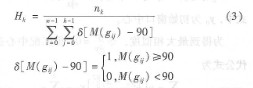
ʽ�У�w��h�քe��Դ�D��Č���nk��M��ġ�0�����ڵ�k���Ƕȅ^(q��)�g��(n��i)�������c����(sh��)��
��lena�D��������քe��iena�D���M��߅�������Ӌ��߅������ֱ���D�����ýY������D1��ʾ��
����������ӳ�����S�D��Ĕ�(sh��)��(j��)��Ϣ����߅����ⷽ��ֱ���D�c���g��Ϣ�Y�ϣ��õ����g߅������ֱ���D[78]�����cĿ��߅���Y�����P�����܉����@�^(q��)��߅�������_���}��Ч����̫���룬�����GʧĿ�ˡ���Q���φ��}�����]߅������ֱ���D����هĿ�˵�ɫ
����ʽ�����x�ɷ����g߅������ֱ���D�����ƶȣ�
|