�����W�j�ľ����\��ϵ�y���ƽ�_���R
�x�P��2���T���t1
(1�Ϻ�������W��Ϣ�c�C늹��̌WԺ���Ϻ�200234��2������ӿƼ���W��ӹ��̌WԺ���������710071)
ժ Ҫ��ᘌ������\�Ӷ�λϵ�y�к��ƽ�_�������^�c�t���ďͺ����ԣ������һ�N������W�j�Y������ͨ�����ڱƽ��⻬ϵ�y���W�jģ���M����������ǹ⻬�Ǿ������Ե�ģ�ͣ���ģ�ͽY��������һ�N�ǹ⻬�������������V�x�ݶȸ��M�������㷨�������䌦�����\��ϵ�y�ĺ��зǹ⻬�Ǿ��Ե��\�������M�н�ģ�������OӋ���W�j�У�ͬ�rҲ�����˔Uչ�q�R���g���������Ȍ��t�����ԵĶ�ֵӳ��׃��һһӳ�䣬����߀�C���˲�����仯�����ӻ����q�R�ƽ��ı�Ҫ�Լ���Uչ�q�R���g��;�������H���R�Y��������������Ľ�ģ����ȡ�������˝M��ĽY����
�P�I�~���ǹ⻬�Ǿ��ԣ��W�j�����ӻ��������\��ϵ�y
�ЈD���̖��tp 27 �īI���R�a��a
l����
���г̸߾����\�Ӷ�λϵ�y�V�������ھ��ܼӹ��������·�x�졢��W�����c���ܙCе���I���S�����\�Ӿ��ȵȿ���ָ�˵���ߣ���회�ϵ�y�д��ڵķǹ⻬�Ǿ������ԣ������^��͡��t���ȣ��M���a������t������Ӱ�ϵ�y���\�Ӿ��ȡ��ٶȺ��`���ȣ�������ɸ߾����\��ϵ�y�ڌ��H�\���аl����ʎ������p�ġ���ˣ����������@Щ�ǹ⻬�Ǿ������ԵĔ��Wģ�͌��a�����OӋ���P��Ҫ����һ�����棬���@��s�ĄӑB�ǹ⻬�Ǿ���ϵ�y���H���ó�Ҏ���R�����y�Խ����侫�_ģ�ͣ���횰lչ�µı��R������
�����W�j���и߾��ȵıƽ��������еČW�ߌ������뵽�߾����\��ϵ�y�Ľ�ģ�С����Ƕ��������H�m���ڹ⻬����ֵ�Ǿ���ϵ�y��ͬ�r���C�����Â��y���W�j���ܱƽ���ֵӳ��F�������t�����ԣ�����ˣ���Ҫ�о��m�ڌ��t���c���^�ͺϵķǾ��������M�н�ģ�ķ��������Ļ��ڔUչݔ����g˼��[10-12]��������һ�N�W�j�Y����ʹ֮�ܱƽ�ϵ�y��������N�ǹ⻬�Ǿ��ԏͺ��������a����Ӱ푣�����������ķǹ⻬Ӗ���㷨��
2�\��ϵ�y����
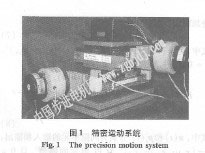
�������о��ľ����\��ϵ�y����λ�C��dsp��������늚����ϵ�y�͙Cе����ϵ�y���ɡ�ԓϵ�y����Dl��ʾ��
���У�늚���Ӳ��������Դ������ֱ���ŷ�늙C�M�ɣ��Cе���Ӳ����ɸ߾��ܵ��A�o�L��z�ܡ��Cе�\��ƽ�_�M�ɣ������C���ɹ�늾��a�P���߾��ܹ��ϵ�y�M�ɣ���M��ʾ��D����D2��ʾ��
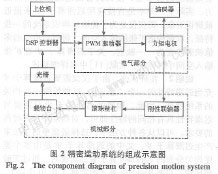
��Ҋ�����Ƶĸ߾����\��ϵ�y�M�ɲ������࣬�ܶಿ�������зǹ⻬�Ǿ������ԣ���늙C���S�������g϶��ƽ�_�\���Юa��Ħ���ȣ����@Щ�����ڽ�ģ�^���б�횼��Կ��]�����˸����_�ش_��ϵ�y�д��ڵĸ��N���ԣ��������ȽY���OӋ�^�̣��M�Мyԇ��ݔ����̖��u(t) =3��exp��-0. 6t����sin( 2�С�5t)(v)����ݔ��ݔ���Pϵ����D3��ʾ��
�ĈD3��֪��ԓϵ�y���\�����Գ������B�������⣬ϵ�y߀���^���ǹ⻬�Ǿ����t�������^���ԡ���ˣ����õı��Rģ�ͱ�횿��]�@3�N���Ե�Ӱ푣��������@��s�ęC�ϵ�y��
3�Uչ���R���g
���O����R��ϵ�y���ú���f(��)����ʾ�����R���}�䌍�ǂ������ƽ����}����������ģ�͵ĸ����������ஔ�ں����ƽ��Ļ����Ӧ�(��)��ϵ�y���R��Ŀ�����ҵ�һ�M������{a1��a2����an}��ʹ�ã�
���}1��t�ʦ����x���������g���ϵ�һ���ӿ��g��{��1(��)����2(��)��������n(��)}�Ǧӵ�һ�M���ӻ����������һ������f(��)�� �t����f(.)δ����ͨ�^����{��1(��)����2(��)��������n(��)}�ľ��ԔU�������_��
�C���Og(��)��t���tg(��)��ȫ����������{��1(��)����2(��)��������n(��)}���� |