���ڈD���R�e�������ڹ���ϴ�C�����OӋ
������1���ռ1��÷��2���츦��2
��1�㽭��W�F�����칤���о������㽭����3100272�Ї�������܊73021��ꠣ��㽭����310023��
ժ Ҫ��ᘌ���ǰʿ���˹���ϴ�ڹ��ȴ�Ч�ʵ͵Ȇ��}���Լ��F����ϴ�O���ڌ��H�����д��ڵ��w�e���|���ء����ܻ��̶ȵ͵Ȳ��㣬���ڈD���R�e���g��ģʽ�R����Փ��������һ�N�����ڹ���ϴ�C���ˡ�ԓ�����ڹ���ϴ�C���˲���Ƕ��ʽ����ϵ�y�����ÈD��̎�����g�����F����ϴ�^�̵Ŀ�ҕ������ͨ�^ɫ��������ȡ�㷨���F�ˌ����ŃȒ��~�^�����ȡ������ģ��ģʽ�R�e�������������ŃȒ��~�^��ֲ���Ҏ���Լ����H�D��̎����õ�����Ϣ�팍�F�����ŵ�������ϴ�����H���ñ������������ڹ���ϴ�C���������ԏ�����ϴЧ�ʸߣ��������õđ���ǰ����
�P�I�~���ڹܣ�Ƕ��ʽ���D���R�e��ģ��ģʽ�R�e��������ϴ
�ЈD���̖��tp 273 �īI���R�a��a
1����
�����ڰl������в��H�������ŃȚ�����������|�����һ����ڏ����c���܃ȱ��g�����a��������ճ����@Щ���|�ܸߜء��߉��������c�ܱ���N�طdz��ι̣������Ǿ����ڵġ�ꎾ�������λ�õĚ�����O��������������ڹ܉����a���ܴ��Ӱ푣������e�������^һ���̶ȺO�a��ը�ܵ��¹ʡ�
�^ȥ��Ҫ�������y���˹��͙Cе���õķ������ڹ��M����ϴ�����cʿ���˔��^�࣬�ڄӏ��ȴ�Ч���^�͡����F�е�Һ���ƗUʽ���������Mʽ���ڹ���ϴ�O�������y�����أ����ܻ��̶ȵ͡���ˣ�����һ�N�����ڹ���ϴ�C���ˣ����H���ԘO��p�pʿ���Ąڄӏ��ȣ����ҿ�����Ч����ڵľS�o���Bˮƽ�����܉���������߲�ꠑ��������^���܊�ºͽ���Ч�档
���������о��_�l�����ܻ����]ʽ�����ڹ���ϴ�C���ˣ�����Ƕ��ʽ����ϵ�y�����ЈD���R�eģ�K���܉�ᘌ����~�^���M������������c���y�IJ�ϴ��ȣ��������ϴЧ�ʣ�ͬ�rҲ���F����ϴ�^�̵Ŀ�ҕ����
2 ϵ�y���鼰����ָ��
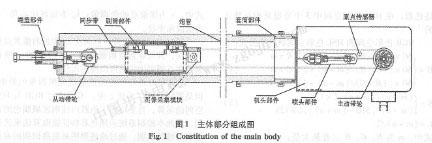
1)ϵ�y�����ڹ���ϴ�C���˷֙Cе�Ϳ��ƃɲ��֣��Cе������Ҫ�����C�^���������w�������X�Ύ����Ӳ�����ˢͲ���������^���������Ʋ�����Ҫ����ֱ���oˢ늙C��늴��y���D��ɼ�ģ�K���D��̎��ģ�K��Ƕ��ʽ����ϵ�y���C�������C���ּ~�ɣ���D1��ʾ��
ֱ���oˢ늙C�����ӎ�݆���D��ͨ�^�X��ͬ�������ӣ�ʹ�̶���ͬ�����϶˵�ˢͲ�������ڹ܃�ֱ���\�ӣ�ֱ���oˢ늙C���b�л������������ܷ�����ǰˢͲ��λ����Ϣ��ˢë��Ͳо֮�g�����OӋ��L��Ħ�����Ķ�ʹˢë���H��������ֱ���\�ӣ��������M���������D�\�ӡ��@�Ӳ����������ϴЧ�������ҷ�ֹ����ϴ�����ڕr�l��ͬ����Ť�D����r�����^�������������Ńȇ�����ϴҺ��ͨ�^���W��ʽ���~�����ܡ����b�d��ˢͲ��˵ĈD��ɼ�ģ�K�����r�ɼ����ŃȱڵĈD����Ϣ���ṩ�oҺ��ģ�K�M��ҕ�l�@ʾ��ͬ�r���ͽo�D��̎��ģ�K�M�ЈD���R�e��
2)ϵ�y����ָ��ϵ�y�ľ��w����ָ�����£�
�ٷ����ԣ����r�ԣ��m����- 30��~60��h���ض��¹��������o�ȼ�ip42�����𡣠�����������̖���Fλ�ü��ٶȵęz�y��Ƕ��ʽϵ�y��ģ�Kͨ�^pwm���F��ֱ��늙C�D�ٵĿ��ơ�
�ڸ߶ȼ��ɻ���yʽ�OӋ�����Ƶ�ϵ�y��B�O�ؼ��������\��ܣ����ھS�o��
�D��̎��ģ�K��Ҫ��ɱO�؈D����@ʾ�Լ����ŃȒ��~�^����R�e���M��ģ��ģʽ�R�e���F������ϴ���˙C����ģ�K���ڿ��������ݔ�뼰ϵ�y�\��
�������R�e���܌��F���^��������ϴ�������@ʾ�������m���ڹ�ֱ����76��155 mm����
���m���ڹ��L�ȣ�6��10 m��
����ϴЧ�ʸߣ�30~ 50 min/�T��
3����ϵ�yӲ���OӋ
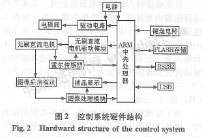
����ϵ�y��Ӳ���Y���D����D2��ʾ��
�ɈD��֪��ϵ�y��Ҫ���Է֞�Ƕ��ʽϵ�y��ģ�K���oˢֱ��늙C������K���D��̎��ģ�K�Լ��˙C���� |