�в�����늙Cϵ�yЧ�ʵ�׃���L��������
������ʷ����
�����ϿƼ���W�Ԅӻ�ϵ�����471003��
ժҪ���錍�F����늙Cϵ�y�\��Ч��****����ԓ���ڱ��C�D���]�h�������ܵĻ��A�ϣ����F�˰������·�ڃȵ�늙Cϵ�yЧ�ʃ������ơ����o���˻����_�h�D���{�����Ժͻ���ģ�����ƵăɷN��׃��늉���ֵ�{�����L�ă������Ʒ������s����Ч�ʃ����^�̕r�g�������ϵ�y���w�\��Ч�ʣ��������D��}jj�h�������ܡ������������᷽������Ч�ԡ�
�P�I�~������늙C��ϵ�yЧ�ʣ���������
�ЈD���̖. tm359. 9 �īI��־�a��a ���¾�̖��1001-6848( 2010) 07-0025-04
o�� ��
����늙C�m���T�����c��������늙C�\�ӿ���ϵ�y���\��Ч���h���ڂ��y늴�늙C[2-3]����Ŀǰ����늙C����Ҫ���È��Ͼ���������Դ��늈��ϣ�Ч�ʆ��}�dz���늙C�ܷ������P�I��V�����õ��P�I�������������Ч���ѳɞ鳬��늙C�I�����о���Q���P�I���}֮һ��
�������о�����늙Cϵ�yЧ�ʿ������ԵĻ��A�ϣ��OӋ�����F�˳���늙Cϵ�yЧ���ھ��������ƣ��o���˻����_�h�D���{�����Ժͻ���ģ�����ƵăɷN׃���LЧ�ʃ��������㷨���s����Ч�ʃ����^�̕r�g��ʹϵ�y���w�\��Ч�ʵõ���ߡ�
1����늙Cϵ�yЧ���c��늉���ֵ���Pϵ
����늙Cϵ�y��Ч�ʃ������ƣ���Ҫ�܉����늙Cϵ�y��ǰЧ�ʠ�r�ķ�������ݔ���Cе���ʲ���ֱ�Ӝy��������늙Cϵ�y��Ч�ʷ���ͨ�������g�ӷ�ʽ�������·ݔ���Դ늉��㶨���t�·ݔ�������׃���ͷ�ӳ��늙Cϵ�y�ڮ�ǰؓ�d��r�µ�Ч��׃�����҃���֮�g�ɷ������Pϵ���pСݔ��������ɽ���늙Cϵ�yݔ�빦�ʣ��༴��߳���늙Cϵ�y���\��Ч�ʡ����ԣ����Ը���ݔ�������ֵ��׃�����Д�늙Cϵ�y��Ч���Ƿ���ߡ�
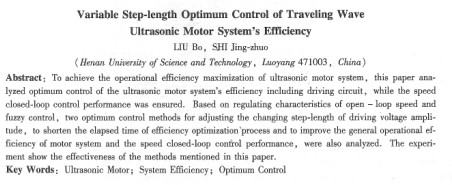
�����о������{����늉���ֵ�ķ��������F����늙Cϵ�yЧ���ھ��������ơ���ˣ��OӋ�ˈD1��ʾ���D���]�h+Ч�ʃ����Ŀ���ϵ�y���Dʾϵ�y���û�������pwm��h�����·m1��ϵ�y�Ŀ����^�̞飬늙C�ژO�c�����D�ٿ����������£��������_ʼ�{�l���ӣ����ӕr����늉���ֵ�o��ֵuref�ij�ֵuref(0)= 300 v���������^�̽Y�����D���_�����B�r��Ч�ʃ����������_ʼ�{�����M��Ч�ʃ������ƣ�Ч�ʃ��������^���У��D���]�h������Ȼ�{���l���Ա����D�ٿ������ܡ�Ч�ʃ���������������ǰ�r��ݔ���������׃������i��k�����_��uref���{���������ӻ�pС�������磬����i (k)<0����ݔ��������ڜpС���t�S��k-l�r�̵�uref�{������׃���^�m���սo���IJ��L��һ���{����׃���������ӻ�pС����֮���t��׃�{���������^���У����Lʼ�K���ֲ�׃���ʿɷQ֮�鶨���LЧ�ʃ������ơ�
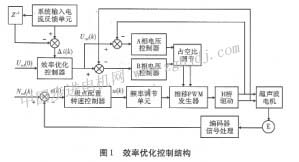
�D2�o�����D�ٽo��ֵnrd =30 r.min-l���O��uref�{�����L��1v�r��Ч�ʃ����^�̌��y�������ɈD2��֪������ͨ�^uref��һֱ�pС�팍�Fϵ�y��Ч�ʃ����������ɈD2Ҳ�ɿ�����������uref�����pС���{���^�̣��D��ƫ�����@���ڟouref���{���ĕr�Ρ��@����������һ�N��Ӕ_�ӣ���늉���ֵ�ĸ�׃Ӱ����D�ٿ���Ч����
2 ϵ�yЧ�ʵ�׃���L��������
ǰ��Ч�ʃ������Ʋ��ù̶��������L�ă�����ʽ�����@�N�����LЧ�ʃ��������У����������L���turef�½����ʼӿ죬Ч�ʃ����^�̕r�g�s�̣�����ʹϵ�y�Ŀ��w�\��Ч�ʵõ��Mһ����ߡ����Ɍ��Y����֪�������Ӳ��Lʹ��uref���½��ٶ��^�죬늙C�D�ٕ�Ѹ�ٴ���½�����������늙CͻȻͣ�D���@���Ĺ̶��Ľ������Lֵ�������ޣ��Ҍ������׃���c늉���ֵ�{��֮�g���Pϵ���@һ�Pϵ���OӋЧ�ʃ������Ƶ�ǰ��ͻ��A�����������ڌ��H���{����늉���ֵ�����ȣ�δ�l�F늉���ֵһݔ�����׃�������Ĺ��c�����������І��{�½��ԣ���늉���ֵԽ�ͣ�ݔ�����ԽС��ϵ�yЧ��Խ�ߡ���ˣ�Ҫ���Fϵ�yЧ�ʃ������ƣ�ֻ������늉��Ŀ��{������һֱ������ֱ��������늉�����ֵ���˕rϵ�y��ֱ��ݔ������_����Сֵ���͌� |